This whitepaper is for historical reference only. Some content might be outdated and some links might not be available.
Source code
MicroPython application example
The Pycom LoPy4 ESP32 development board used for this demonstration has the following physical connectivity, as outlined in this schematics diagram:
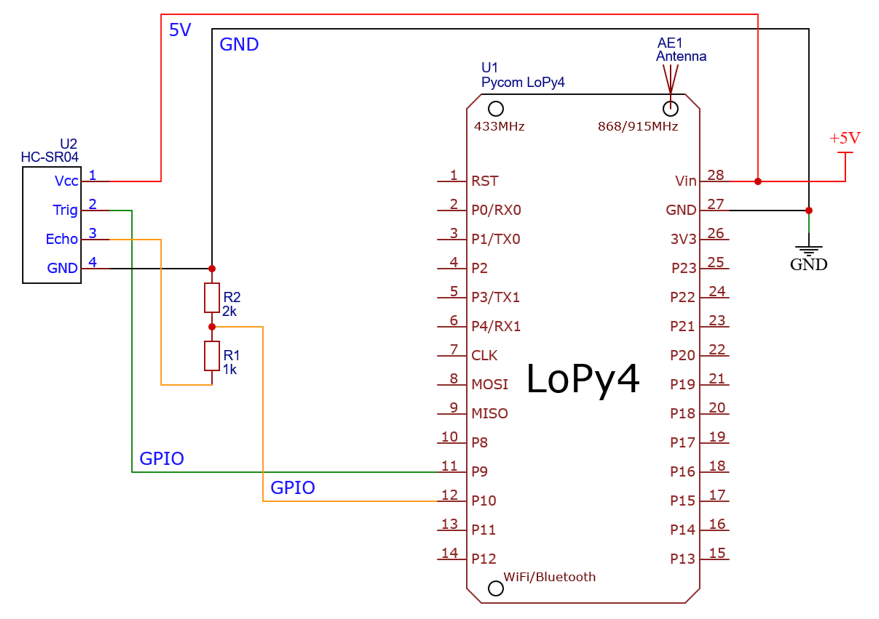
Figure 22 – ESP32 development board schematics
Note
In this example, a voltage divider is used on the output of the HC-SR04’s echo pin to convert the 5V to 3.3V.
Note that this diagram does not show receive/transmit (RX/TX) serial connections
required to program the board, nor the recommended button between P2 and ground (GND) to
place the device into bootloader mode. Refer to the Pycom LoPy4 Product Info,
Datasheets
Table 1 – ESP32 development board physical connectivity
| Module | ESP32 (LoPy4) pin | Description |
|---|---|---|
| HC-SR04 | P9 | Trigger |
| HC-SR04 | P10 | Echo |
| 5V | Vin | 5V |
| GND | GND | Ground |
""" Sample MicroPython application for the Pycom LoPy4 development board. Demonstrates unconfirmed data uplink of HC-SR04 ultrasonic distance sensor readings using LoRaWAN. Uses LoRaWAN OTAA support of Pycom's network driver. Spends time in deep sleep between readings to conserve power. """ # Required MicroPython libraries # pylint: disable=E0401 import socket import utime import ubinascii from machine import Pin, deepsleep from network import LoRa # HC-SR04 ultrasonic distance sensor configurations HCSR04_TRIGGER_PIN = "P9" HCSR04_ECHO_PIN = "P10" HCSR04_ECHO_TIMEOUT_MS = const(50) # pylint: disable=E0602 # LoRaWAN OTAA connection details. Replace with own settings. LORAWAN_APP_EUI = ubinascii.unhexlify("REPLACE") LORAWAN_APP_KEY = ubinascii.unhexlify("REPLACE") LORAWAN_OTAA_TIMEOUT_MS = const(30000) # pylint: disable=E0602 # Additional program configurations PROGRAM_LOOP_MS = const(600000) # pylint: disable=E0602 PROGRAM_WAIT_MS = const(3000) # pylint: disable=E0602 # pylint: disable=R0903 class HCSR04(): """ Driver for HC-SR04 ultrasonic distance sensor """ # HC-SR04 fixed parameters HCSR04_US_TO_CM_CONST = const(58) # pylint: disable=E0602 HCSR04_MAX_RANGE_CM = const(400) # pylint: disable=E0602 def __init__(self, trigger_pin, echo_pin, echo_timeout_ms): """ Initialises HC-SR04 ultrasonic distance sensor pins """ self.trigger_pin = Pin(trigger_pin, mode=Pin.OUT, pull=None) self.echo_pin = Pin(echo_pin, mode=Pin.IN, pull=None) self.echo_timeout_ms = echo_timeout_ms self.distance_cm = None def get_distance_cm(self): """ Retrieves distance to nearest surface in m (decimal). Raises exception if range is unsupported, or if echo response times out. This is a blocking method. """ echo_detected = False self.trigger_pin(True) utime.sleep_us(10) self.trigger_pin(False) echo_timeout_start_ms = utime.ticks_ms() while (utime.ticks_ms() - echo_timeout_start_ms) < self.echo_timeout_ms: if self.echo_pin(): # If high is detected on echo pin, start echo timer echo_detected = True echo_timer_start_us = utime.ticks_us() break if echo_detected: while self.echo_pin(): pass # If echo pin goes low, stop echo timer duration_us = utime.ticks_us() - echo_timer_start_us self.distance_cm = duration_us / self.HCSR04_US_TO_CM_CONST if self.distance_cm > self.HCSR04_MAX_RANGE_CM: raise OSError( "Unsupported HC-SR04 range (>" + str(self.HCSR04_MAX_RANGE_CM) + "cm)" ) else: # If no error signal is detected, time out raise OSError( "Failed to detect echo signal (>" + str(self.echo_timeout_ms) + "ms)" ) return self.distance_cm def main(): """ Runs the ultrasonic distance sensor check and dispatches results as unconfirmed data upload LoRaWAN payload. Payload is 2 bytes (first byte is distance in m, second byte is remaining distance in cm). Programs enters deep sleep in between checks. """ start_time = utime.ticks_ms() data = bytearray(2) sensor = HCSR04( trigger_pin=HCSR04_TRIGGER_PIN, echo_pin=HCSR04_ECHO_PIN, echo_timeout_ms=HCSR04_ECHO_TIMEOUT_MS ) try: distance_m = sensor.get_distance_cm() / 100 print( "Distance recorded (" + str(distance_m) + "m)" ) except OSError as exception: print( "Sensor fault (" + str(exception) + ")" ) else: # First byte of output is distance in m data[0] = int(str(distance_m).split(".")[0]) # Second byte of output is remainder of the distance in cm data[1] = int(str(distance_m).split(".")[1][:2]) # LoRaWAN OTAA data upload. Region is EU868 (change as required). lora = LoRa(mode=LoRa.LORAWAN, region=LoRa.EU868) lora.join(activation=LoRa.OTAA, auth=(LORAWAN_APP_EUI, LORAWAN_APP_KEY), timeout=0) otaa_timeout_start_ms = utime.ticks_ms() while (utime.ticks_ms() - otaa_timeout_start_ms) < LORAWAN_OTAA_TIMEOUT_MS: if lora.has_joined(): print("Joined LoRaWAN") break print("Waiting to join LoRaWAN using OTAA...") utime.sleep(2.5) if lora.has_joined(): lora_socket = socket.socket(socket.AF_LORA, socket.SOCK_RAW) # pylint: disable=E1101 lora_socket.setsockopt(socket.SOL_LORA, socket.SO_DR, 5) # pylint: disable=E1101 lora_socket.setblocking(True) lora_socket.send(data) print( "Bytes sent (" + str(data) + ")" ) lora_socket.setblocking(False) else: print("Failed to join LoRaWAN using OTAA") finally: utime.sleep_ms(PROGRAM_WAIT_MS) print( "Sleeping... (" + str(PROGRAM_LOOP_MS) + "ms)" ) deepsleep(PROGRAM_LOOP_MS - (utime.ticks_ms() - start_time)) if __name__ == "__main__": main()
Lambda decoder function example
import json import base64 import boto3 import botocore client = boto3.client('iot-data') mqtt_topic = 'myTopic/' def lambda_handler(event, context): """ Decode LoRa payload and republish back to AWS IoT as a transformed event """ river_level_bytes = base64.b64decode(event['PayloadData']) # First byte of payload is meters, second byte centimeters river_level = river_level_bytes[0] + (river_level_bytes[1] / 100) event_transformed = { 'river_level': river_level, 'timestamp': event['WirelessMetadata']['LoRaWAN']['Timestamp'] } try: response = client.publish( topic=mqtt_topic+event['WirelessDeviceId']+'/', payload=json.dumps(event_transformed) ) except botocore.exceptions.ClientError as error: print('Operataion failed! ' + str(error)) else: print('Event successfully transformed and republished!')
