Le traduzioni sono generate tramite traduzione automatica. In caso di conflitto tra il contenuto di una traduzione e la versione originale in Inglese, quest'ultima prevarrà.
Calibra il tuo veicolo AWS DeepRacer
Per ottenere le migliori prestazioni, è essenziale calibrare alcune parti fisiche del DeepRacer veicolo AWS. Se il veicolo in uso non è calibrato, si potrebbero riscontrare incertezza durante i test del modello. Se le prestazioni del veicolo non sono ottimali, si potrebbe essere tentati di regolare solo il codice del modello di apprendimento profondo. Tuttavia, le prestazioni del veicolo non possono essere migliorate se la causa principale è meccanica. Regolare la meccanica tramite calibrazione.
Per calibrare il tuo DeepRacer veicolo AWS, imposta l'intervallo del ciclo
La velocità e l'angolo di sterzo massimi definiscono l'estensione dello spazio d'azione. È possibile specificare la velocità massima e il massimo angolo di sterzo durante la formazione in ambiente di simulazione. Quando si implementa il modello addestrato su un DeepRacer veicolo AWS per la guida su una pista reale, la velocità e l'angolo di sterzata massimi del veicolo devono essere calibrati in modo da corrispondere a quelli utilizzati nell'addestramento di simulazione.
Per fare in modo che le esperienze reali corrispondano a quelle simulate, è opportuno calibrare il veicolo in modo da corrispondere alla velocità e agli angoli di sterzo massimi tra la simulazione e il mondo reale. In generale, la calibrazione si può ottenere in due modi:
-
Definendo lo spazio d'azione nell'addestramento e calibrando il veicolo fisico in modo che corrisponda alle impostazioni.
-
Misurando le prestazioni effettive del veicolo e modificando le impostazioni dello spazio d'azione nella simulazione.
Un modello affidabile è in grado di gestire alcune differenze tra la simulazione e il mondo reale. Tuttavia, è consigliabile sperimentare entrambi gli approcci e iterare per ottenere i risultati migliori.
Prima di avviare la calibrazione, attiva il modulo di calcolo. Quando è partito e il LED di alimentazione è diventato blu fisso, accendi la batteria del veicolo. Se senti due bip brevi e un bip lungo, sei pronto a procedere con la calibrazione.
Per calibrare il DeepRacer veicolo AWS in modo che corrisponda alle impostazioni di allenamento:
-
Seguire queste istruzioni per accedere al veicolo e aprire la console di controllo del dispositivo.
-
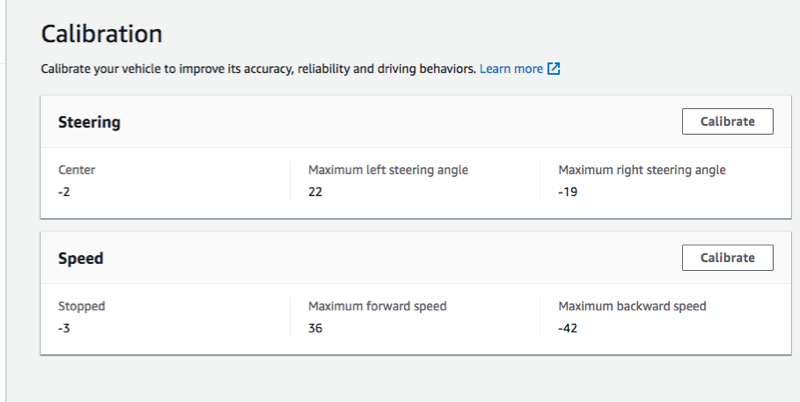
Selezionare Calibration (Calibrazione) dal riquadro di navigazione principale.
-
Nella pagina Calibration (Calibrazione), selezionare Calibrate (Calibra) in Steering (Sterzata), quindi seguire i passaggi descritti di seguito per calibrare gli angoli di sterzata massimi del veicolo.
-
Posizionare il veicolo a terra o su un'altra superficie dura dove è possibile vedere le ruote nella calibrazione della sterzata. Scegli Next (Successivo).
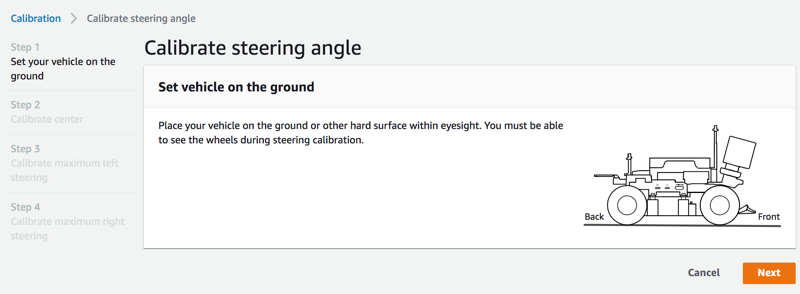
La sterzata di un veicolo in un circuito richiede angoli di sterzata molto più ridotti rispetto a far girare le ruote in aria. Per misurare gli angoli di sterzata effettivi delle ruote, è importante posizionare il veicolo sulla superficie del circuito.
-
In Center steering (Centra sterzata), spostare gradualmente il cursore o premere la freccia destra o sinistra fino alla posizione in cui almeno una delle ruote anteriori è allineata alla ruota posteriore nello stesso lato. Scegli Next (Successivo).
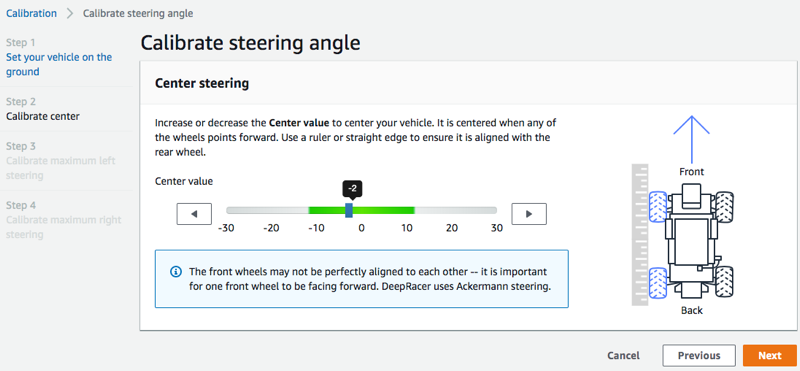
AWS DeepRacer utilizza lo sterzo anteriore Ackermann
per far girare le ruote all'interno e all'esterno di una curva. Ciò comporta che in genere le ruote anteriori girano ad angoli diversi. In AWS DeepRacer, la calibrazione viene eseguita sul valore centrale. Pertanto, è necessario regolare le ruote sul lato selezionato in modo che siano perfettamente allineate. Nota
Assicurati di calibrare bene il tuo DeepRacer veicolo AWS in modo che possa mantenere lo sterzo centrale il più dritto possibile. Ciò può essere testato spingendo manualmente il veicolo per verificare che segua un percorso dritto.
-
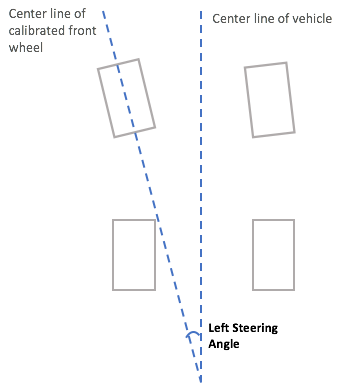
In Maximum left steering (Sterzata sinistra massima), spostare gradualmente il cursore verso sinistra o premere la freccia sinistra fino a quando le ruote anteriori del veicolo non smettono di girare a sinistra. Si sentirà un lieve rumore. Se il rumore è forte, si è esagerato. La posizione corrisponde all'angolo massimo di sterzata a sinistra. Se l'angolo di sterzata è stato limitato nello spazio d'azione simulato, abbinare qui il valore corrispondente. Scegli Next (Successivo).

Per misurare l'angolo massimo effettivo di sterzata a sinistra, disegnare una linea centrale nel veicolo, contrassegnare i punti estremi della ruota anteriore selezionata per la calibrazione e tracciare la linea centrale della ruota anteriore fino a quando non incrocia la linea centrale del veicolo. Utilizzare un goniometro per misurare l'angolo. Vedere la figura in basso Se si desidera far corrispondere l'angolo effettivo nella formazione, è possibile impostare lo stesso valore nello spazio d'azione nel processo di formazione successivo.
-
In Maximum right steering (Sterzata destra massima), spostare gradualmente il cursore verso destra fino a quando le ruote anteriori non smettono di girare a destra. Si sentirà un lieve rumore. Se il rumore è forte, si è esagerato. La posizione corrisponde all'angolo massimo di sterzata a destra. Se l'angolo di sterzata è stato limitato nello spazio d'azione simulato, abbinare qui il valore corrispondente. Seleziona Fatto.
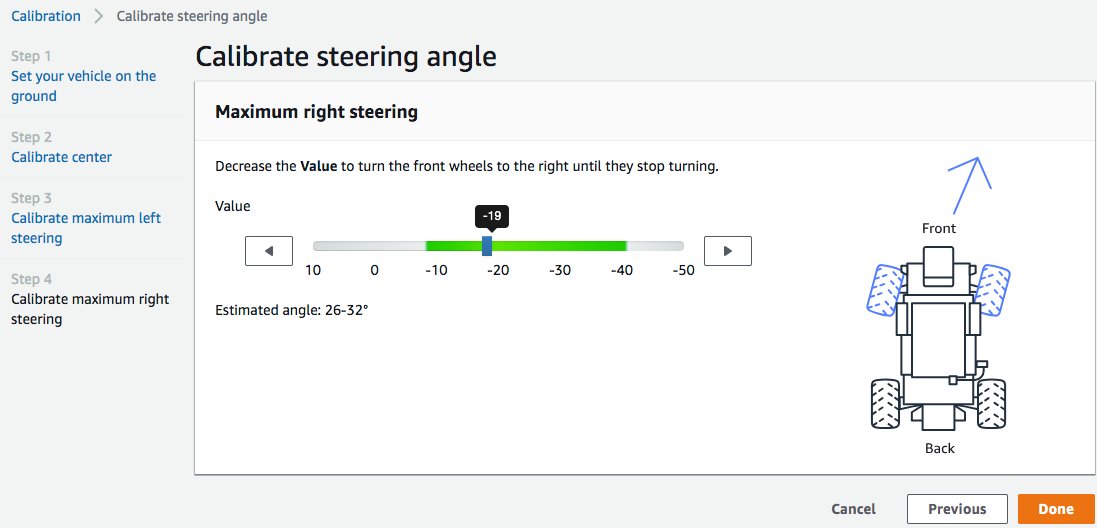
Per misurare l'angolo massimo effettivo di sterzata a destra, seguire i passaggi simili a quelli utilizzati per misurare l'angolo massimo di sterzata a sinistra.
Questo conclude la calibrazione dello sterzo per il tuo veicolo DeepRacer AWS.
-
-
Per calibrare la velocità massima del veicolo, selezionare Calibrate (Calibra) in Speed (Velocità) nella pagina Calibration (Calibrazione), quindi seguire i passaggi descritti di seguito.
-
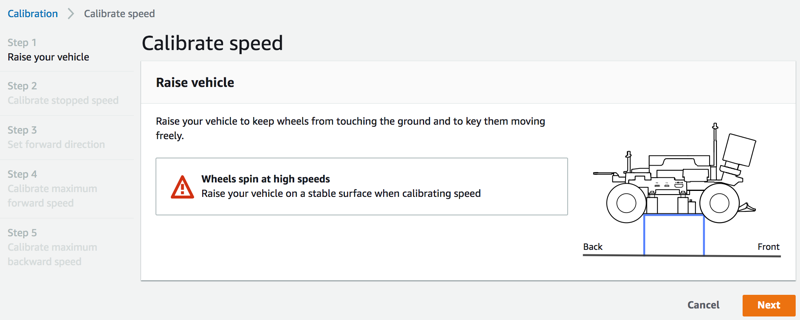
Sollevare il veicolo in modo che le ruote possano girare liberamente. Scegliere Next (Avanti) nella console di controllo del dispositivo.
Nota
Se la velocità impostata è troppo alta, il veicolo potrebbe andare troppo forte in fase di calibrazione e danneggiare l'ambiente, se stesso o altri utenti nelle vicinanze. È consigliabile sollevare il veicolo, come qui illustrato, ma non tenerlo tra le mani.
-
Per calibrare la velocità arrestata, premere la freccia sinistra o destra per modificare gradualmente Stopped value (Valore arrestato) in Stopped speed (Velocità arrestata) nella console di controllo del dispositivo fino a quando le ruote non smettono di girare. Scegli Next (Successivo).

Nota
Se premendo Stopped value (Valore arrestato) ancora a sinistra o a destra fino al valore in cui si iniziano a sentire rumori, le ruote si stanno per muovere. Il punto ideale di accelerazione zero è la metà tra i due valori. Ad esempio, se si inizia a sentire un rumore a 16 a sinistra e a -4 a destra, il valore di arresto ottimale è 10.
-
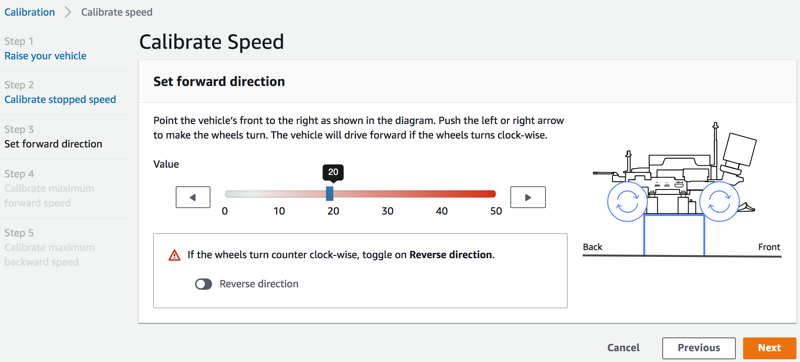
Per impostare la direzione in avanti del veicolo, posizionare il veicolo nel modo illustrato qui sulla schermata e nell'immagine, quindi premere la freccia sinistra o destra per far girare le ruote. Se le ruote girano in senso orario, la direzione in avanti è impostata. In caso contrario, attivare Reverse direction (Inverti direzione). Scegli Next (Successivo).
Nota
I veicoli distribuiti a AWS re:Invent 2018 potrebbero avere la direzione di avanzamento impostata in senso inverso. In questo caso, assicurarsi di attivare Reverse direction (Inverti direzione).
-
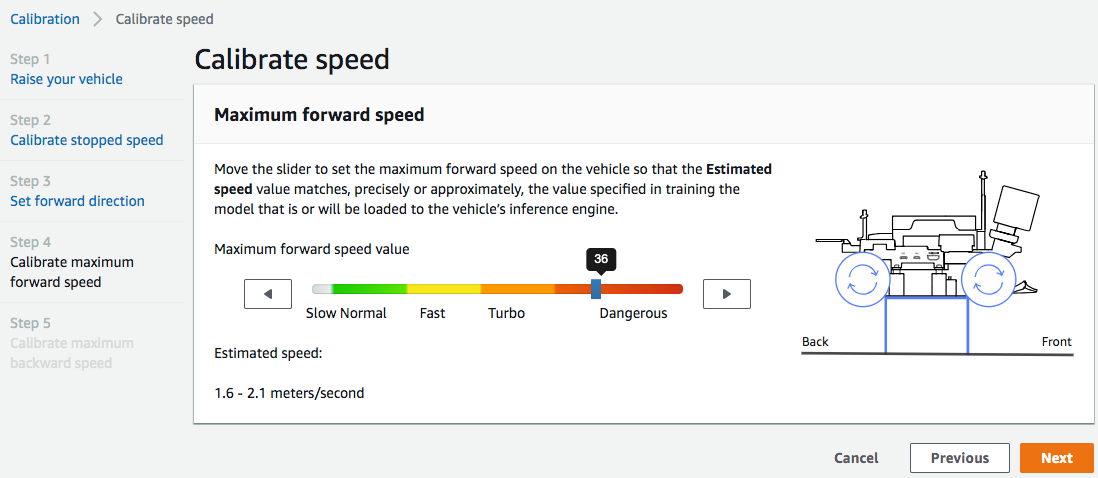
Per calibrare la velocità massima in avanti, in Maximum forward speed (Velocità massima in avanti), spostare delicatamente il cursore a sinistra o a destra per regolare gradualmente il numero Maximum forward speed value (Valore di velocità massima in avanti) fino a un valore così positivo che il valore Estimated speed (Velocità stimata) sia uguale o simile alla velocità massima indicata nella simulazione. Scegli Next (Successivo).
Nota
La velocità massima effettiva del veicolo dipende dall'attrito della superficie del circuito, nonché dal livello della batteria del veicolo. Per renderla flessibile, è possibile impostare il limite di accelerazione del veicolo in modo che sia del 20-30% superiore alla velocità massima specificata per la formazione nella simulazione. In linea generale, è consigliabile impostare il valore della velocità massima all'interno dell'area verde. Al di sopra di quest'area, il veicolo potrebbe andare troppo forte con elevati rischi di rottura. Inoltre, lo spazio d'azione per la formazione non supporta una velocità massima superiore ai 2 m/s.
-
Per calibrare la velocità massima all'indietro, in Maximum backward speed (Velocità massima all'indietro), spostare delicatamente il cursore a sinistra o a destra per regolare gradualmente il numero Maximum backward speed value (Valore di velocità massima all'indietro) fino a un valore così negativo che il valore Estimated speed (Velocità stimata) sia uguale o simile alla velocità massima indicata nella simulazione. Seleziona Fatto.
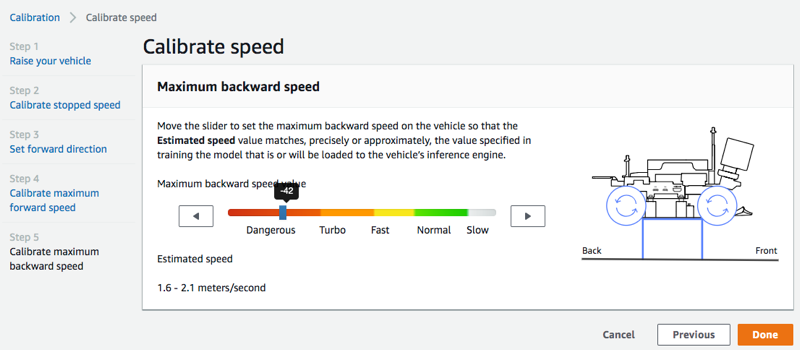
Nota
Il DeepRacer veicolo AWS non utilizza la velocità all'indietro nella modalità di guida autonoma. È possibile impostare la velocità all'indietro su qualunque valore con cui si possa comodamente controllare la modalità di guida manuale del veicolo.
Questo conclude la calibrazione della velocità massima del DeepRacer veicolo AWS.
-
