翻訳は機械翻訳により提供されています。提供された翻訳内容と英語版の間で齟齬、不一致または矛盾がある場合、英語版が優先します。
Nuvoton NuMaker-IoT-M487 の開始方法
重要
これは、FreeRTOS リリース 202210.00 で使用する「FreeRTOS ユーザーガイド」のアーカイブ版です。このドキュメントの最新バージョンについては、FreeRTOS ユーザーガイドを参照してください。
このチュートリアルでは、Nuvoton NuMaker-IoT-M487 開発ボードの使用を開始するための手順について説明します。シリーズマイクロコントローラーには、RJ45 イーサネットおよび Wi-Fi モジュールが組み込まれています。Nuvoton NuMaker-IoT-M487 をお持ちでない場合は、AWS Partner Device Catalog
開始する前に、開発ボードを AWS クラウドに接続するように AWS IoT と FreeRTOS ソフトウェアを設定する必要があります。手順については、最初のステップ を参照してください。このチュートリアルでは、FreeRTOS ダウンロードディレクトリへのパスを freertos
概要
このチュートリアルでは次のステップを説明します。
-
マイクロコントローラーボード用の組み込みアプリケーションを開発およびデバッグするためのソフトウェアをホストマシンにインストールします。
-
FreeRTOS デモアプリケーションをバイナリイメージにクロスコンパイルします。
-
アプリケーションバイナリイメージをボードにロードし、アプリケーションを実行します。
開発環境をセットアップする
Keil MDK Nuvoton エディションは、Nuvoton M487 ボード用のアプリケーションを開発およびデバッグするために設計されています。Keil MDK v5 Essential、Plus、または Pro バージョンは Nuvoton M487 (Cortex-M4 コア) MCU でも動作します。Keil MDK Nuvoton エディションは、Nuvoton Cortex-M4 シリーズ MCU の割引価格でダウンロードできます。Keil MDK は Windows でのみサポートされています。
NuMaker-IoT-M487 用の開発ツールをインストールするには
-
Keil MDK ウェブサイトから Keil MDK Nuvoton Edition
をダウンロードします。 -
ライセンスを使用して Keil MDK をホストマシンにインストールします。Keil MDK には、Keil µVision IDE、C/C++ コンパイルツールチェーン、および µVision デバッガーが含まれています。
インストール中に問題が発生した場合は、Nuvoton
にお問い合わせください。 -
Nuvoton Development Tool
ページにある Nu-Link_Keil_Driver_V3.06.7215r (または最新バージョン) をインストールします。
FreeRTOS デモプロジェクトを構築して実行する
FreeRTOS デモプロジェクトを構築するには
-
Keil µVision IDE を開きます。
-
[File] (ファイル) メニューで、[Open] (開く) を選択します。[Open file] (ファイルを開く) ダイアログボックスで、ファイルタイプセレクタが [Project Files] (プロジェクトファイル) に設定されていることを確認します。
-
構築する Wi-Fi またはイーサネットデモプロジェクトを選択します。
-
Wi-Fi デモプロジェクトを開くには、
freertos\projects\nuvoton\numaker_iot_m487_wifi\uvision\aws_demosaws_demos.uvprojを選択します。 -
イーサネットデモプロジェクトを開くには、
freertos\projects\nuvoton\numaker_iot_m487_wifi\uvision\aws_demos_ethaws_demos_eth.uvprojを選択します。
-
-
ボードをフラッシュするための設定が正しいことを確認するには、IDE で
aws_demoプロジェクトを右クリックし、[Options] (オプション) を選択します。(詳細については、トラブルシューティング をご覧ください。) -
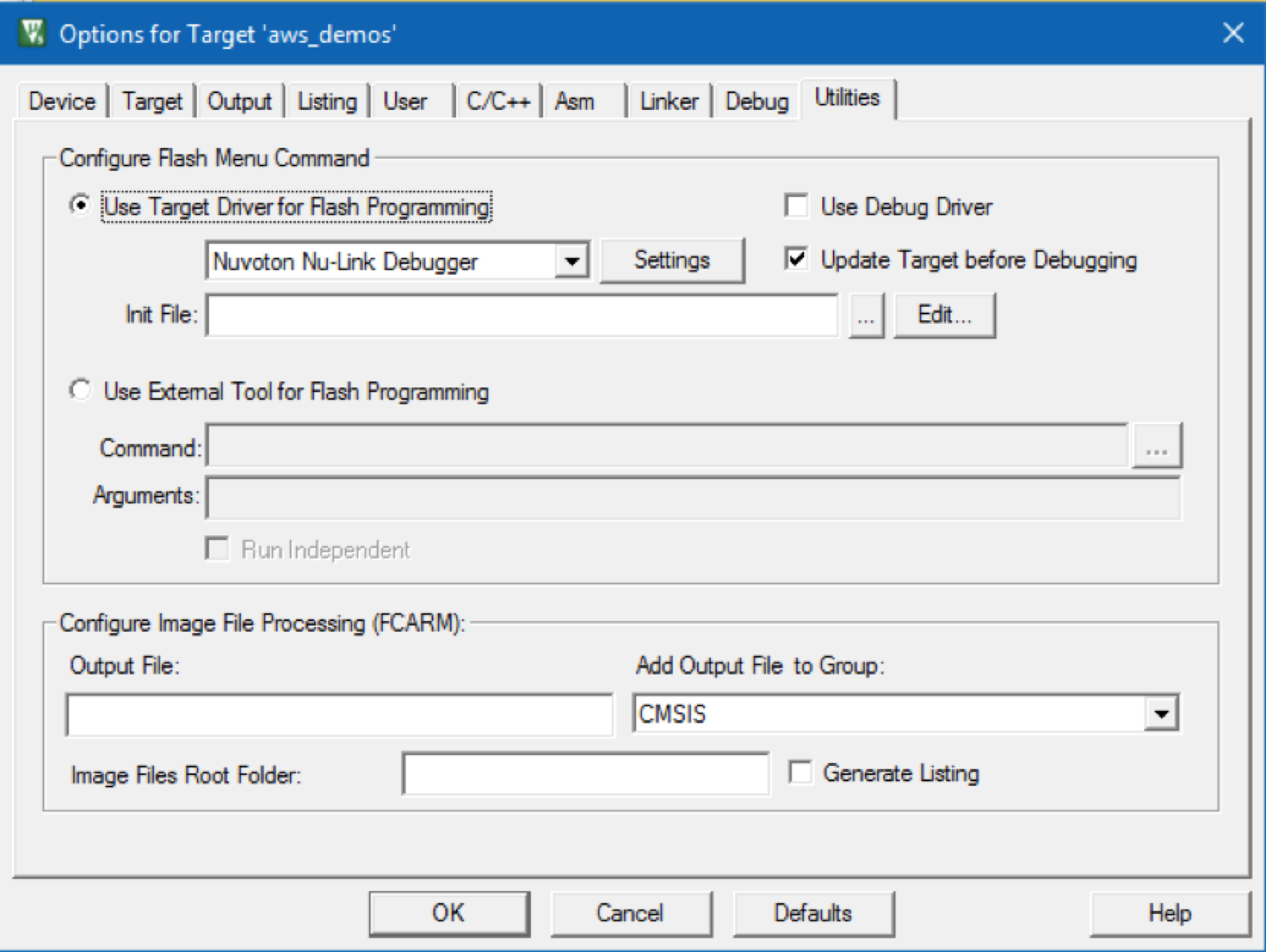
[Utilities] (ユーティリティ) タブで、[Use Target Driver for Flash Programming] (フラッシュプログラミング用のターゲットドライバーを使用する) が選択されており、[Nuvoton Nu-Link Debugger] (Nuvoton Nu-Link デバッガー) がターゲットドライバーとして設定されていることを確認します。
-
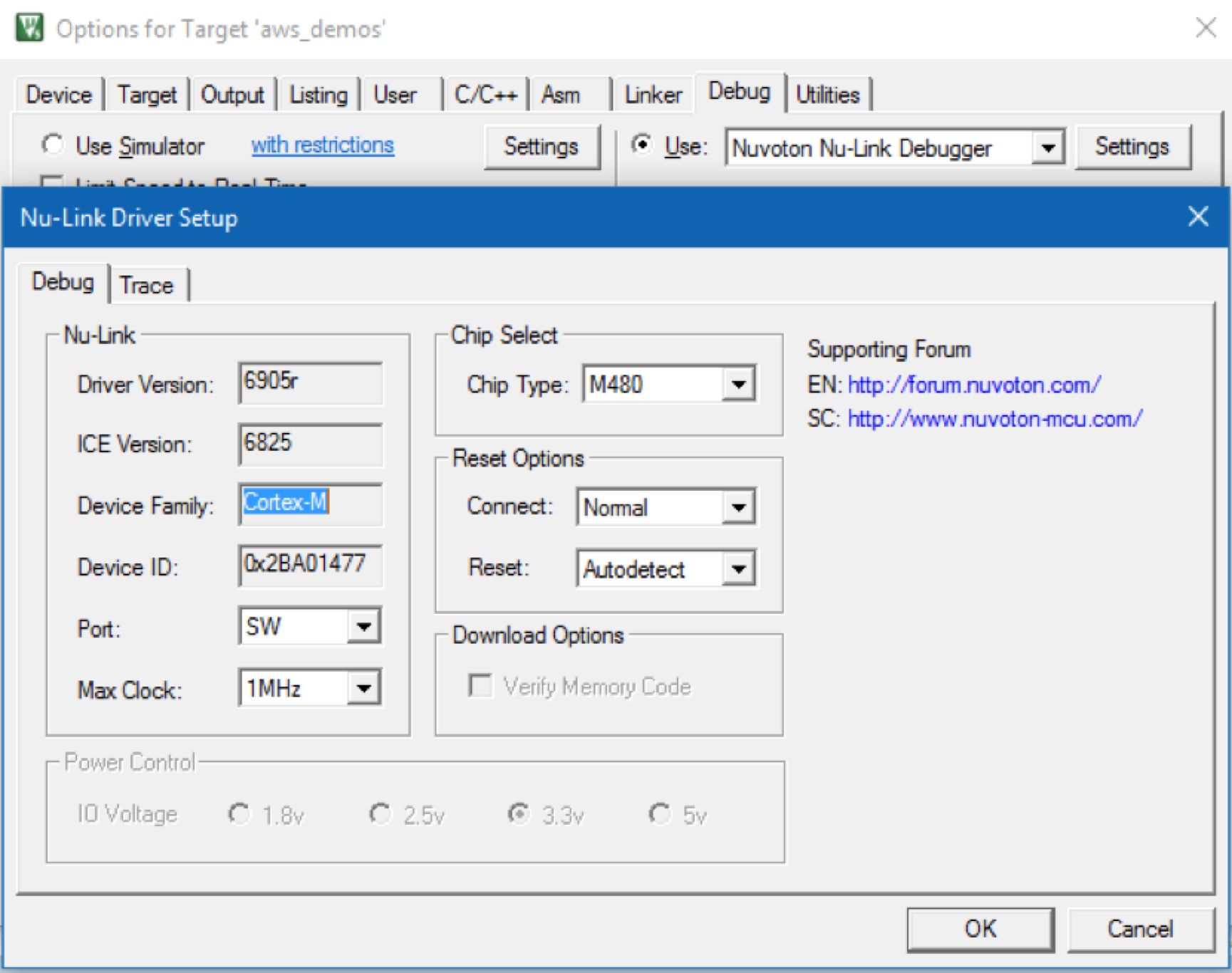
[Debug] (デバッグ) タブで、[Nuvoton Nu-Link Debugger] (Nuvoton Nu-Link デバッガー) の横にある [Settings] (設定) を選択します。
-
[Chip Type] (チップのタイプ) が [M480] に設定されていることを確認します。
-
Keil µVision IDE [Project] (プロジェクト) ナビゲーションペインで、
aws_demosプロジェクトを選択します。[Project] (プロジェクト) メニューで [Build Target] (ターゲットを構築) を選択します。
AWS IoT コンソールで MQTT クライアントを使用して、デバイスが AWS クラウドに送信するメッセージをモニタリングできます。
MQTT クライアントで AWS IoT MQTT トピックをサブスクライブするには
-
AWS IoT コンソール
にサインインします。 -
ナビゲーションペインで、[テスト] を選択し、[MQTT テストクライアント] を選択して MQTT クライアントを開きます。
-
[Subscription topic] (トピックのサブスクリプション) で
your-thing-name/example/topic
FreeRTOS デモプロジェクトを実行するには
-
Numaker-IoT-M487 ボードをホストマシン (コンピュータ) に接続します。
-
プロジェクトを再構築します。
-
Keil µVision IDE の [Flash] (フラッシュ) メニューで、[Download] (ダウンロード) を選択します。
-
[Debug] (デバッグ) メニューで、[Start/Stop Debug Session] (デバッグセッションの開始/停止) を選択します。
-
デバッガーが
main()のブレークポイントで停止したら、[Run] (実行) メニューを開き、[Run (F5)] (実行 (F5)) を選択します。AWS IoT コンソールの MQTT クライアントに、デバイスによって送信された MQTT メッセージが表示されます。
FreeRTOS で CMake を使用する
CMake を使用して、サードパーティーのコードエディタやデバッグツールを使用して開発した FreeRTOS デモアプリケーションやアプリケーションを構築して実行することもできます。
CMake ビルドシステムがインストールされていることを確認します。FreeRTOS で CMake を使用する の指示に従った後に、このセクションのステップに従います。
注記
コンパイラ (Keil) の場所へのパスが Path システム変数 (C:\Keil_v5\ARM\ARMCC\bin など) にあることを確認します。
AWS IoT コンソールで MQTT クライアントを使用して、デバイスが AWS クラウドに送信するメッセージをモニタリングすることもできます。
MQTT クライアントで AWS IoT MQTT トピックをサブスクライブするには
-
AWS IoT コンソール
にサインインします。 -
ナビゲーションペインで、[テスト] を選択し、[MQTT テストクライアント] を選択して MQTT クライアントを開きます。
-
[Subscription topic] (トピックのサブスクリプション) で
your-thing-name/example/topic
ソースファイルからビルドファイルを生成し、デモプロジェクトを実行するには
-
ホストマシンで、コマンドプロンプトを開き、
freertosフォルダに移動します。 -
生成されたビルドファイルを格納するフォルダを作成します。このフォルダは、
BUILD_FOLDERと呼びます。 -
Wi-Fi またはイーサネットデモのビルドファイルを生成します。
-
Wi-Fi の場合:
FreeRTOS デモプロジェクトのソースファイルが格納されているディレクトリに移動します。次に、以下のコマンドを実行してビルドファイルを生成します。
cmake -DVENDOR=nuvoton -DBOARD=numaker_iot_m487_wifi -DCOMPILER=arm-keil -S . -BBUILD_FOLDER-G Ninja -
イーサネットの場合:
FreeRTOS デモプロジェクトのソースファイルが格納されているディレクトリに移動します。次に、以下のコマンドを実行してビルドファイルを生成します。
cmake -DVENDOR=nuvoton -DBOARD=numaker_iot_m487_wifi -DCOMPILER=arm-keil -DAFR_ENABLE_ETH=1 -S . -BBUILD_FOLDER-G Ninja
-
-
以下のコマンドを実行して、M487 にフラッシュするバイナリを生成します。
cmake --buildBUILD_FOLDERこの時点で、バイナリファイル
aws_demos.binはBUILD_FOLDER/vendors/Nuvoton/boards/numaker_iot_m487_wifi -
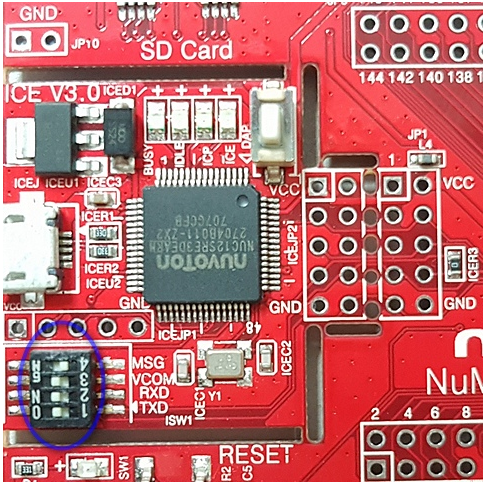
ボードをフラッシュモードに設定するには、MSG スイッチ (ICE の ISW1 の 4 番) がオンになっていることを確認します。ボードに接続すると、ウィンドウ (およびドライブ) が割り当てられます。(「トラブルシューティング」を参照してください。)
-
ターミナルエミュレータを開き、UART 経由でメッセージを表示します。ターミナルエミュレーターをインストールする の指示に従います。
-
生成されたバイナリをデバイスにコピーして、デモプロジェクトを実行します。
MQTT クライアントで AWS IoT MQTT トピックにサブスクライブした場合、 AWS IoT コンソールにデバイスから送信された MQTT メッセージが表示されます。
トラブルシューティング
-
Windows がデバイス
VCOMを認識できない場合は、Nu-Link USB Driver v1.6から NuMaker Windows シリアルポートドライバーをインストールします。 -
Nu-Link 経由でデバイスを Keil MDK (IDE) に接続する場合は、次に示すように MSG スイッチ (ICE 上の ISW1 の 4 番) がオフになっていることを確認します。
開発環境の設定やボードへの接続で問題が発生した場合は、Nuvoton
Keil μVision での FreeRTOS プロジェクトのデバッグ
Keil µVision でデバッグセッションを開始するには
-
Keil µVision を開きます。
-
手順に従って、FreeRTOS デモプロジェクトを構築して実行する で FreeRTOS デモプロジェクトを構築します。
-
[Debug] (デバッグ) メニューで、[Start/Stop Debug Session] (デバッグセッションの開始/停止) を選択します。
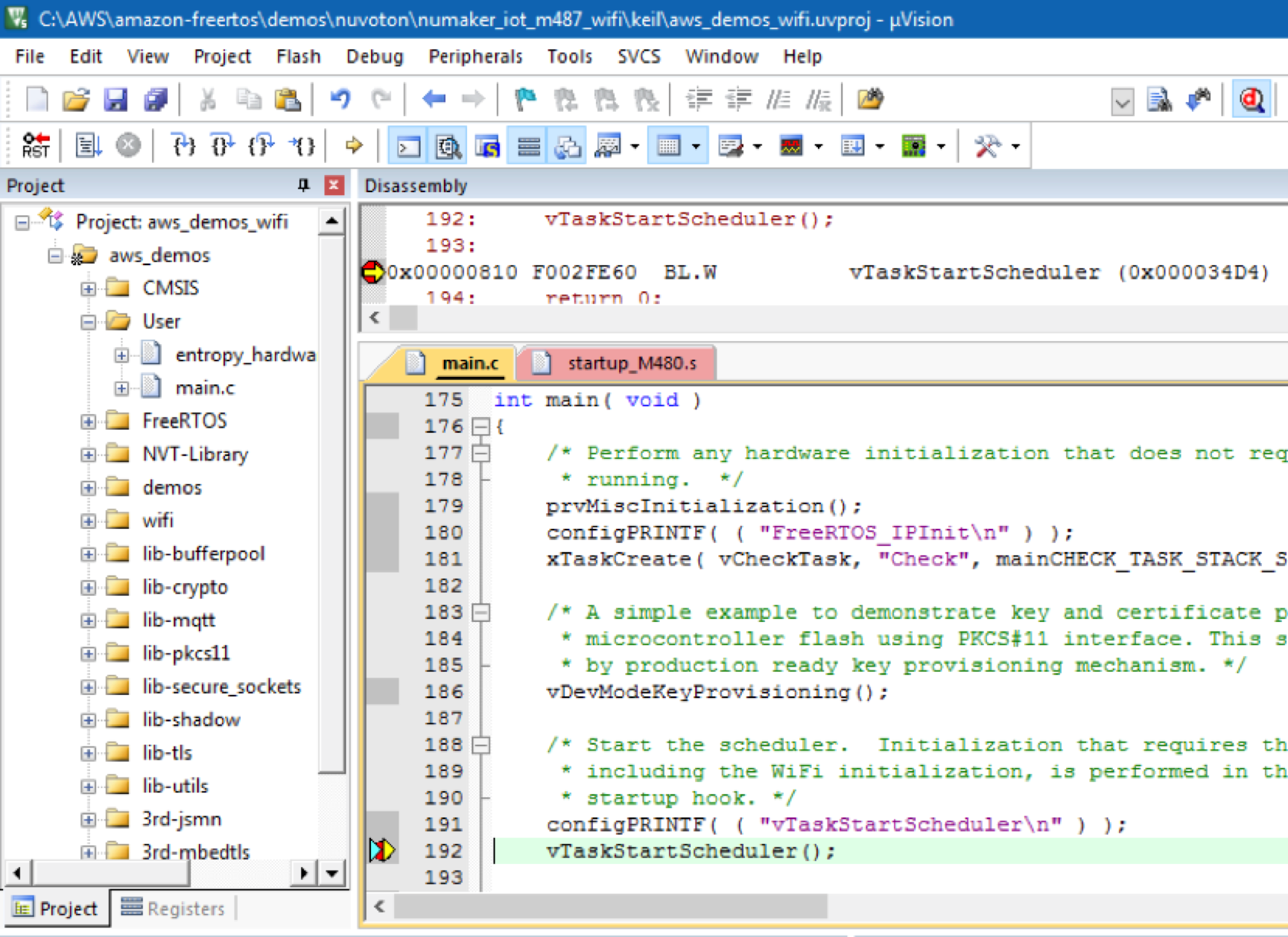
デバッグセッションを開始すると、[Call Stack+Locals] (スタックの呼び出し + ローカル) ウィンドウが表示されます。μVision はデモをボードに点滅させ、デモを実行し、
main()関数の先頭で停止します。 -
プロジェクトのソースコードのブレークポイントを設定し、コードを実行します。プロジェクトは次のようになります。
μVision デバッグ設定のトラブルシューティング
アプリケーションのデバッグ中に問題が発生した場合は、Keil µVision でデバッグ設定が正しく設定されていることを確認してください。
μVision デバッグ設定が正しいことを確認するには
-
Keil µVision を開きます。
-
IDE で
aws_demoプロジェクトを右クリックし、[Options] (オプション) を選択します。 -
[Utilities] (ユーティリティ) タブで、[Use Target Driver for Flash Programming] (フラッシュプログラミング用のターゲットドライバーを使用する) が選択されており、[Nuvoton Nu-Link Debugger] (Nuvoton Nu-Link デバッガー) がターゲットドライバーとして設定されていることを確認します。
-
[Debug] (デバッグ) タブで、[Nuvoton Nu-Link Debugger] (Nuvoton Nu-Link デバッガー) の横にある [Settings] (設定) を選択します。
-
[Chip Type] (チップのタイプ) が [M480] に設定されていることを確認します。
