As traduções são geradas por tradução automática. Em caso de conflito entre o conteúdo da tradução e da versão original em inglês, a versão em inglês prevalecerá.
Calibre seu veículo da AWS DeepRacer
Para obter o melhor desempenho, é essencial calibrar algumas partes físicas do seu DeepRacer veículo da AWS. Se você usar um veículo não calibrado, incertezas poderão ser adicionadas ao testar o modelo. Se o desempenho do veículo não for ideal, você poderá querer apenas ajustar o código do modelo de aprendizado profundo. No entanto, não será possível melhorar o desempenho do veículo se a causa raiz for mecânica. Ajuste a mecânica por calibração.
Para calibrar seu DeepRacer veículo da AWS, defina a faixa do ciclo
A velocidade e o ângulo de esterçamento máximos definem o intervalo do espaço de ação. Especifique a velocidade e o ângulo de esterçamento máximos durante o treinamento na simulação. Ao implantar o modelo treinado em seu DeepRacer veículo da AWS para dirigir em uma pista do mundo real, a velocidade máxima e o ângulo de direção do veículo devem ser calibrados para corresponder aos usados no treinamento de simulação.
Para garantir que as experiências reais correspondam às experiências simuladas, calibre seu veículo para equiparar a velocidade máxima e o ângulo de esterçamento máximo entre a simulação e o mundo real. Em geral, há duas maneiras de realizar essa calibração:
-
Defina o espaço de ação no treinamento e calibre o veículo físico para corresponder às configurações.
-
Meça o desempenho real do veículo e altere as configurações do espaço de ação na simulação.
Um modelo robusto pode lidar com determinadas diferenças entre a simulação e o mundo real. No entanto, você deve fazer testes com ambas as abordagens e iterar para encontrar os melhores resultados.
Antes de iniciar a calibração, ligue o módulo de computação. Depois de ser iniciado e o LED de alimentação acender na cor azul sólida, ligue a bateria do veículo. Depois de escutar dois bipes curtos e um bipe longo, a calibração poderá ser iniciada.
Para calibrar seu DeepRacer veículo da AWS de acordo com as configurações de treinamento:
-
Siga estas instruções para acessar o veículo e abrir o console de controle do dispositivo.
-
Escolha Calibration (Calibração) no painel de navegação principal.
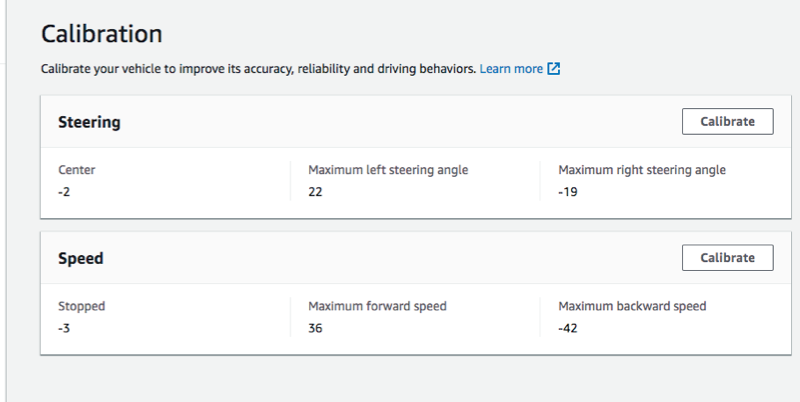
-
Na página Calibration (Calibração), escolha Calibrate (Calibrar) em Steering (Direção) e siga as etapas abaixo para calibrar os ângulos de esterçamento máximo do veículo.
-
Coloque o veículo no chão ou em outra superfície dura onde possa ver as rodas durante a calibração da direção. Escolha Próximo.
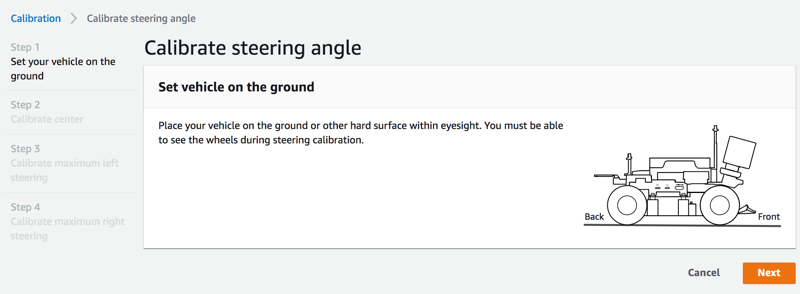
Virar um veículo em uma pista requer ângulos de esterçamento muito menores do que girar as rodas no ar. Para medir os ângulos de esterçamento reais das rodas é importante colocar o veículo na superfície da pista.
-
Em Center steering (Centralizar a direção), mova gradualmente o controle deslizante ou pressione as setas para a esquerda ou direita até a posição em que pelo menos uma das rodas dianteiras esteja alinhada com a roda traseira do mesmo lado. Escolha Próximo.
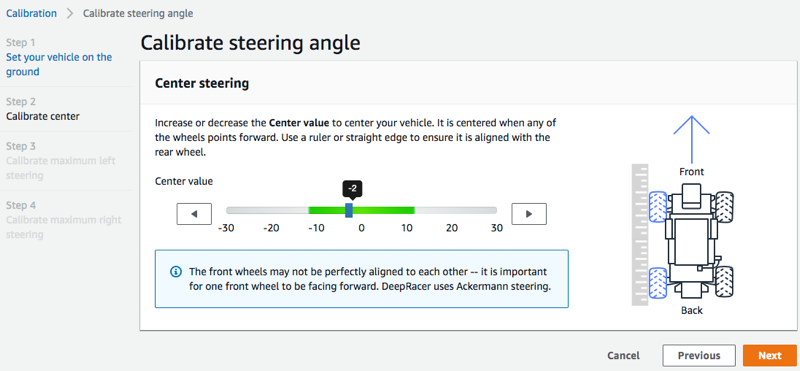
DeepRacer A AWS usa a direção dianteira Ackermann
para girar as rodas na parte interna e externa de uma curva. Isso significa que as rodas dianteiras esquerda e direita normalmente viram com ângulos diferentes. Na AWS DeepRacer, a calibração é feita no valor central. Portanto, é necessário ajustar as rodas no lado selecionado para que estejam alinhadas. nota
Certifique-se de calibrar bem seu DeepRacer veículo da AWS para que ele possa manter a direção central o mais reta possível. Isso pode ser testado empurrando manualmente o veículo para verificar se segue um trajeto reto.
-
Em Maximum left steering (Esterçamento máximo à esquerda), mova gradualmente o controle deslizante para a esquerda ou pressione a seta para a esquerda até que as rodas dianteiras do veículo parem de virar para a esquerda. Ocorrerá um ruído silencioso. Se você ouvir um ruído alto, significa que foi longe demais. A posição corresponde ao ângulo máximo de esterçamento à esquerda. Se você tiver limitado o ângulo de esterçamento no espaço de ação simulado, iguale o valor correspondente aqui. Escolha Próximo.
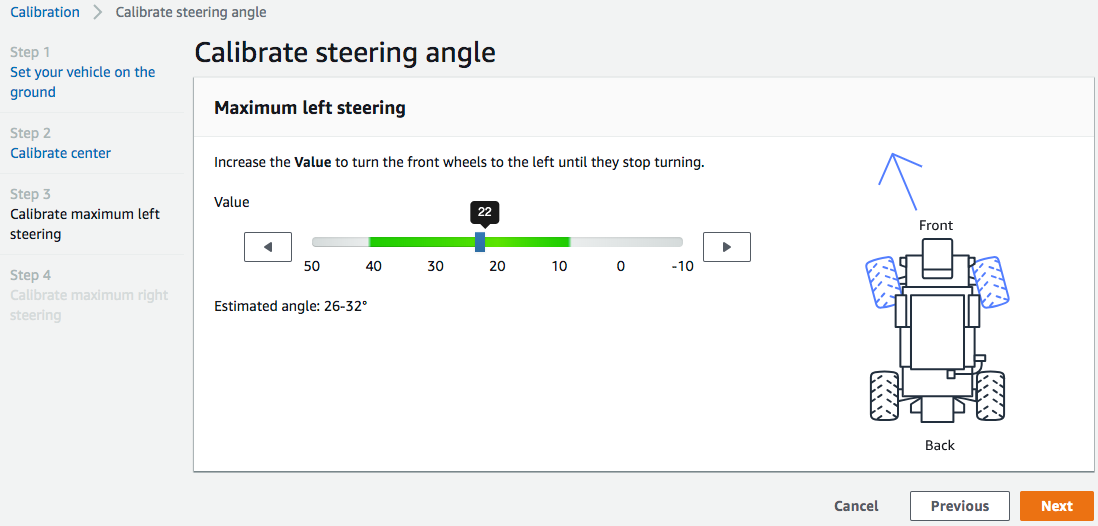
Para medir o ângulo máximo de esterçamento à esquerda real, desenhe uma linha de centro para o veículo, marque os dois pontos de borda da roda dianteira selecionada para calibração e desenhe a linha de centro dessa roda dianteira até cruzar a linha de centro do veículo. Use um transferidor para medir o ângulo. Veja a figura abaixo. Se quiser corresponder o ângulo real no treinamento, defina o mesmo valor no espaço de ação em sua próxima tarefa de treinamento.

-
Em Maximum right steering (Esterçamento máximo à direita), mova gradualmente o controle deslizante para a direita até que a roda dianteira selecionada pare de virar para a direita. Ocorrerá um ruído silencioso. Se você ouvir um ruído alto, significa que foi longe demais. A posição corresponde ao ângulo máximo de esterçamento à direita. Se você tiver limitado o ângulo de esterçamento no espaço de ação simulado, iguale o valor correspondente aqui. Selecione Concluído.
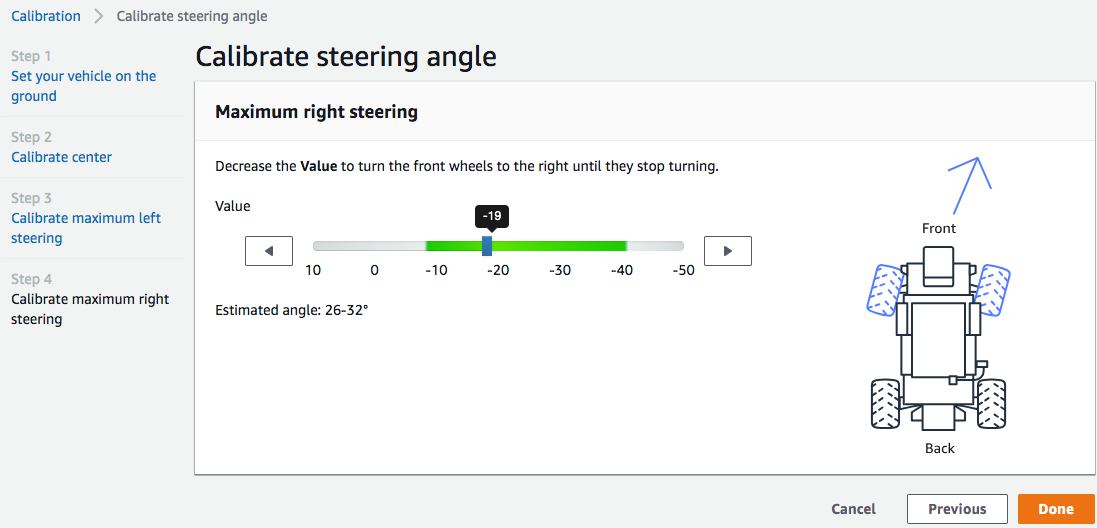
Para medir o ângulo máximo de esterçamento à direita real, siga as etapas semelhantes àquelas usadas para medir o ângulo máximo de esterçamento à esquerda.
Isso conclui a calibração da direção do seu veículo da AWS DeepRacer .
-
-
Para calibrar a velocidade máxima do veículo, escolha Calibrate (Calibrar) em Speed (Velocidade) na página Calibration (Calibração) e siga as etapas abaixo.
-
Levante o veículo para que as rodas possam girar livremente. Escolha Next (Próximo) no console de controle do dispositivo.
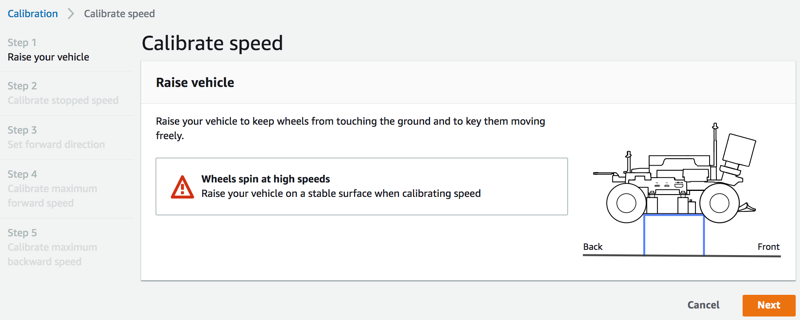
nota
Se a velocidade do veículo tiver sido definida muito alta, ele poderá correr muito rápido durante a calibração e danificar o ambiente, o veículo ou pessoas próximas. Levante o veículo, conforme instruído aqui, mas não segure-o com as mãos.
-
Para calibrar a velocidade parado, pressione as setas para a esquerda ou para a direita a fim de alterar gradualmente Stopped value (Valor parado) em Stopped speed (Velocidade parado) no console de controle do dispositivo até as rodas pararem de girar. Escolha Próximo.

nota
Ao pressionar Stopped value (Valor parado) ainda mais para a esquerda ou para a direita do valor em que começa a ouvir ruídos, as rodas estão prestes a se mover. O ponto de aceleração zero ideal é o ponto intermediário entre os dois valores. Por exemplo, se começar a escutar um ruído em 16 à esquerda e em -4 à direita, o valor parado ideal será 10.
-
Para definir o sentido de deslocamento para a frente do veículo, posicione o veículo conforme mostrado na tela e na imagem aqui e pressione as setas para a esquerda ou para a direita a fim de movimentar as rodas. Se as rodas girarem no sentido anti-horário, o sentido de deslocamento para a frente está definido. Caso contrário, alterne Reverse direction (Inverter sentido). Escolha Próximo.

nota
Os veículos distribuídos no AWS re:Invent 2018 podem ter sua direção para frente definida em sentido inverso. Nesse caso, alterne Reverse direction (Inverter sentido).
-
Para calibrar a velocidade máxima para a frente, em Maximum forward speed (Velocidade máxima para a frente) mova com cuidado o controle deslizante para a esquerda ou para a direita a fim de ajustar o número Maximum forward speed value (Valor da velocidade máxima para a frente) gradualmente até um valor positivo que torne o valor Estimated speed (Velocidade estimada) igual ou semelhante à velocidade máxima especificada na simulação. Escolha Próximo.

nota
A velocidade máxima real do veículo depende da fricção da superfície da pista, bem como do nível da bateria do veículo. Para tornar mais flexível, defina o limite de aceleração do veículo para 20–30% maior que a velocidade máxima especificada para treinamento na simulação. Em outras palavras, defina o valor da velocidade máxima dentro da área verde. Acima disso, é provável que o veículo se movimente muito rápido com maior risco de quebra. Além disso, o espaço de ação para o treinamento não oferece suporte a uma velocidade máxima maior que 2 m/s.
-
Para calibrar a velocidade máxima de ré, em Maximum backward speed (Velocidade máxima de ré) mova com cuidado o controle deslizante para a esquerda ou para a direita a fim de ajustar o número Maximum backward speed value (Valor da velocidade máxima de ré) gradualmente até um valor negativo que torne o valor Estimated speed (Velocidade estimada) igual ou semelhante à velocidade máxima especificada na simulação. Selecione Concluído.
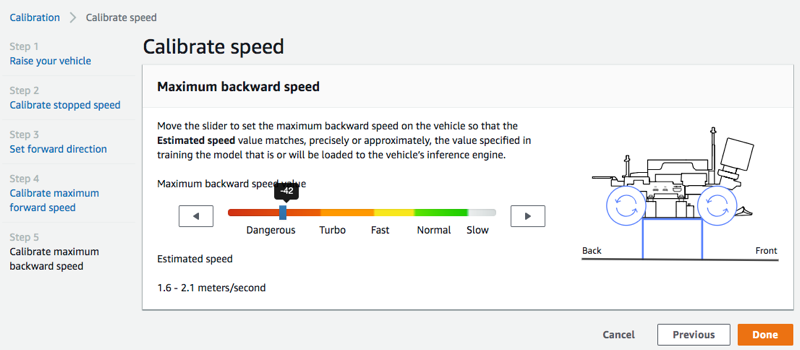
nota
O DeepRacer veículo da AWS não usa a velocidade de retrocesso no modo de direção autônoma. Defina a velocidade de ré para qualquer valor com o qual você se sinta confortável para controlar o modo de condução manual do veículo.
Isso conclui a calibragem da velocidade máxima do DeepRacer seu veículo da AWS.
-
