Die vorliegende Übersetzung wurde maschinell erstellt. Im Falle eines Konflikts oder eines Widerspruchs zwischen dieser übersetzten Fassung und der englischen Fassung (einschließlich infolge von Verzögerungen bei der Übersetzung) ist die englische Fassung maßgeblich.
Erste Schritte mit dem Nuvoton 487 NuMaker-IoT-M
Wichtig
Diese Referenzintegration wird im Amazon-FreeRTOS-Repository gehostet, das veraltet ist. Wir empfehlen, dass Sie hier beginnen, wenn Sie ein neues Projekt erstellen. Wenn Sie bereits ein vorhandenes FreeRTOS-Projekt haben, das auf dem inzwischen veralteten Amazon-FreeRTOS-Repository basiert, finden Sie weitere Informationen unter. Leitfaden zur Migration des Amazon-FreerTOS Github-Repositorys
Dieses Tutorial enthält Anweisungen für die ersten Schritte mit dem Nuvoton 487-Entwicklungsboard. NuMaker-IoT-M Der Mikrocontroller der Serie umfasst integrierte RJ45 Ethernet- und Wi-Fi-Module. Wenn Sie den Nuvoton NuMaker-IoT-M 487 nicht haben, besuchen Sie den Gerätekatalog für AWS Partner
Bevor Sie beginnen, müssen Sie Ihre FreeRTOS-Software konfigurieren AWS IoT , um Ihr Entwicklungsboard mit der AWS Cloud zu verbinden. Detaillierte Anweisungen finden Sie unter Erste Schritte. In diesem Tutorial wird der Pfad zum FreeRTOS-Download-Verzeichnis als bezeichnet. freertos
Übersicht
In diesem Tutorial führen Sie die folgenden Schritte aus:
-
Installieren von Software auf dem Host-Computer zum Entwickeln und Debuggen eingebetteter Anwendungen für Ihre Mikrocontroller-Platine.
-
Eine FreeRTOS-Demo-Anwendung zu einem Binär-Image querkompilieren.
-
Laden des binären Anwendungs-Image auf Ihre Platine und Ausführen der Anwendung.
Einrichten Ihrer Entwicklungsumgebung
Die Keil MDK Nuvoton Edition wurde für die Entwicklung und das Debugging von Anwendungen für Nuvoton M487-Platinen entwickelt. Die Keil MDK v5 Essential-, Plus- oder Pro-Version ist ebenfalls für die Nuvoton M487 (Cortex-M4 Core) MCU geeignet. Sie können die Keil MDK Nuvoton Edition mit einem Preisnachlass für die Nuvoton Cortex-M4-Serie herunterladen. MCUs Das Keil MDK wird nur unter Windows unterstützt.
Um das NuMaker-IoT-M Entwicklungstool für den 487 zu installieren
-
Laden Sie die Keil MDK Nuvoton Edition
von der Keil MDK-Website herunter. -
Installieren Sie das Keil MDK unter Verwendung Ihrer Lizenz auf Ihrem Hostcomputer. Das Keil MDK enthält die Keil µVision-IDE, eine C/C++-Kompilierungs-Toolchain und den µVision-Debugger.
Wenn während der Installation Probleme auftreten, wenden Sie sich an Nuvoton
, um Unterstützung zu erhalten.
Erstellen Sie das FreeRTOS-Demoprojekt und führen Sie es aus
Um das FreeRTOS-Demo-Projekt zu erstellen
-
Öffnen Sie die Keil µVision-IDE.
-
Wählen Sie im Menü File (Datei) die Option Open (Öffnen) aus. Stellen Sie sicher, dass im Dialogfeld Open file (Datei öffnen) die Dateitypauswahl auf Project Files (Projektdateien) festgelegt ist.
-
Wählen Sie entweder das zu erstellende Wi-Fi- oder Ethernet-Demo-Projekt aus.
-
Um das WLAN-Demoprojekt zu öffnen, wählen Sie das Zielprojekt „
aws_demos.uvproj“ im Verzeichnis „freertos\projects\nuvoton\numaker_iot_m487_wifi\uvision\aws_demos -
Um das Ethernet-Demo-Projekt zu öffnen, wählen Sie das Zielprojekt „
aws_demos_eth.uvproj“ im Verzeichnis „freertos\projects\nuvoton\numaker_iot_m487_wifi\uvision\aws_demos_eth
-
-
Um sicherzustellen, dass die Einstellungen zum Flashen der Platine korrekt sind, klicken Sie mit der rechten Maustaste auf das
aws_demo-Projekt in der IDE und wählen Sie dann Options (Optionen). (Weitere Details finden Sie unter Fehlerbehebung.) -
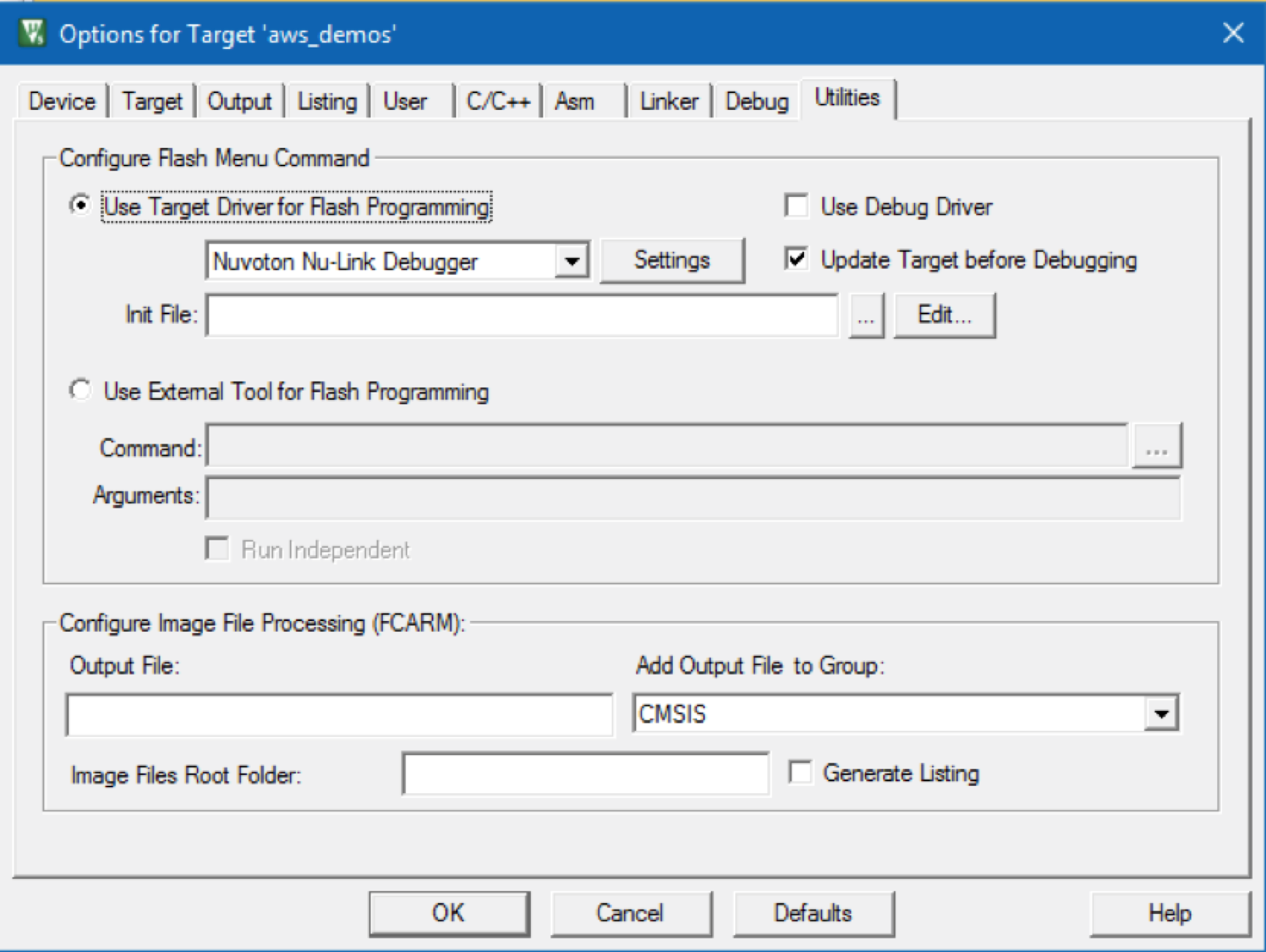
Stellen Sie sicher, dass auf der Registerkarte Utilities (Dienstprogramme) die Option Use Target Driver for Flash Programming (Zieltreiber für Flash-Programmierung verwenden) ausgewählt ist, und dass Nuvoton Nu-Link Debugger als Zieltreiber festgelegt ist.
-
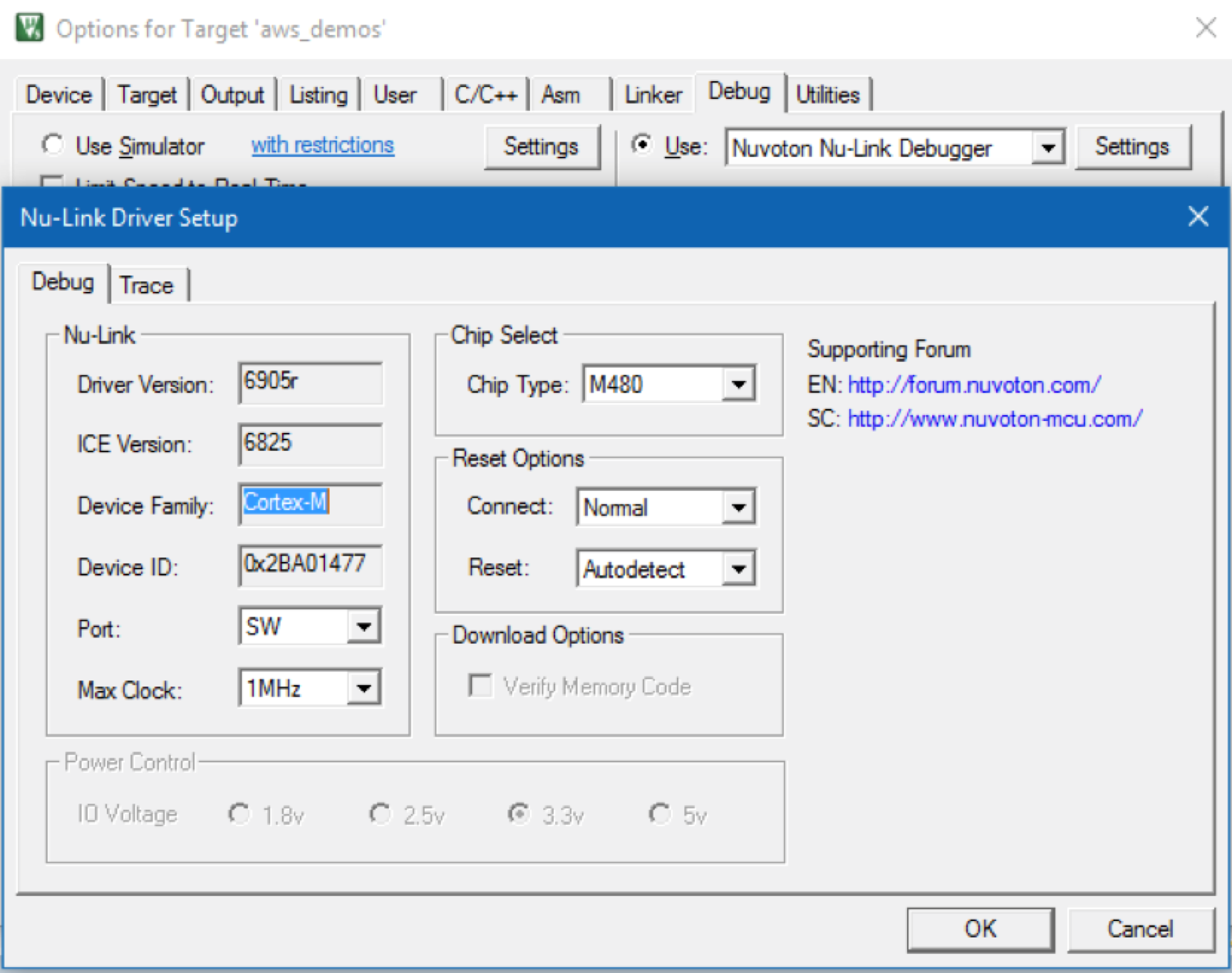
Wählen Sie auf der Registerkarte Debug (Debuggen) neben Nuvoton Nu-Link Debugger die Option Settings (Einstellungen).
-
Stellen Sie sicher, dass der Chip Type (Chiptyp) auf M480 festgelegt ist.
-
Wählen Sie im Navigationsbereich Project (Projekt) der Keil µVision IDE das Projekt
aws_demosaus. Wählen Sie im Menü Project (Projekt) die Option Build Target (Ziel erstellen).
Sie können den MQTT-Client in der AWS IoT Konsole verwenden, um die Nachrichten zu überwachen, die Ihr Gerät an die Cloud sendet. AWS
Um das MQTT-Thema mit dem MQTT-Client zu abonnieren AWS IoT
-
Melden Sie sich an der AWS IoT -Konsole
an. -
Wählen Sie im Navigationsbereich Test und dann MQTT-Testclient, um den MQTT-Client zu öffnen.
-
Geben Sie im Feld Subscription topic (Abonnementthema) die Option
your-thing-name/example/topic
Um das FreeRTOS-Demo-Projekt auszuführen
-
Connect Sie Ihr Numaker-IoT-M 487-Board mit Ihrem Host-Computer (Computer).
-
Erstellen Sie das Projekt neu.
-
Wählen Sie in der Keil µVision-IDE im Menü Flash die Option Download (Herunterladen).
-
Wählen Sie im Menü Debug (Debuggen) die Option Start/Stop Debug Session (Debug-Sitzung starten/stoppen).
-
Wenn der Debugger am Haltepunkt in
main()stoppt, öffnen Sie das Menü Run (Ausführen) und wählen Sie dann Run (F5) (Ausführen (F5)).Sie sollten die von Ihrem Gerät gesendeten MQTT-Nachrichten im MQTT-Client in der Konsole sehen. AWS IoT
Verwendung CMake mit FreeRTOS
Sie können es auch verwenden CMake , um die FreeRTOS-Demoanwendungen oder Anwendungen, die Sie mit Code-Editoren und Debugging-Tools von Drittanbietern entwickelt haben, zu erstellen und auszuführen.
Stellen Sie sicher, dass Sie das Build-System installiert haben. CMake Befolgen Sie die Anweisungen unter Verwendung CMake mit FreeRTOS und führen Sie anschließend die Schritte in diesem Thema aus.
Anmerkung
Stellen Sie sicher, dass sich der Pfad zum Speicherort des Compilers (Keil) in Ihrer Path-Systemvariablen befindet, z. B. C:\Keil_v5\ARM\ARMCC\bin.
Sie können auch den MQTT-Client in der AWS IoT Konsole verwenden, um die Nachrichten zu überwachen, die Ihr Gerät an die AWS Cloud sendet.
Um das MQTT-Thema mit dem MQTT-Client zu abonnieren AWS IoT
-
Melden Sie sich an der AWS IoT -Konsole
an. -
Wählen Sie im Navigationsbereich Test und dann MQTT-Testclient, um den MQTT-Client zu öffnen.
-
Geben Sie im Feld Subscription topic (Abonnementthema) die Option
your-thing-name/example/topic
So generieren Sie Build-Dateien aus Quelldateien und führen das Demoprojekt aus
-
Öffnen Sie auf Ihrem Host-Computer die Eingabeaufforderung und navigieren Sie zu dem
freertosOrdner. -
Erstellen Sie einen Ordner, der die generierten Build-Dateien enthält. Wir werden diesen Ordner als den bezeichnen
BUILD_FOLDER. -
Generieren Sie die Build-Dateien für das Wi-Fi- oder Ethernet-Demo.
-
Für WLAN:
Navigieren Sie zu dem Verzeichnis, das die Quelldateien für das FreeRTOS-Demoprojekt enthält. Generieren Sie dann die Build-Dateien, indem Sie den folgenden Befehl ausführen.
cmake -DVENDOR=nuvoton -DBOARD=numaker_iot_m487_wifi -DCOMPILER=arm-keil -S . -BBUILD_FOLDER-G Ninja -
Für Ethernet:
Navigieren Sie zu dem Verzeichnis, das die Quelldateien für das FreeRTOS-Demoprojekt enthält. Generieren Sie dann die Build-Dateien, indem Sie den folgenden Befehl ausführen.
cmake -DVENDOR=nuvoton -DBOARD=numaker_iot_m487_wifi -DCOMPILER=arm-keil -DAFR_ENABLE_ETH=1 -S . -BBUILD_FOLDER-G Ninja
-
-
Generieren Sie die Binärdatei, die auf den M487 geflasht werden soll, indem Sie den folgenden Befehl ausführen.
cmake --buildBUILD_FOLDERAn diesem Punkt sollte sich die Binärdatei
aws_demos.binim OrdnerBUILD_FOLDER/vendors/Nuvoton/boards/numaker_iot_m487_wifi -
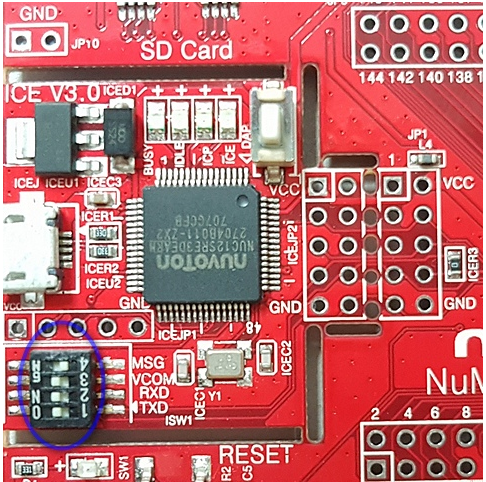
Um die Platine für den Flash-Modus zu konfigurieren, stellen Sie sicher, dass der MSG-Schalter (Nr. 4 von ISW1 on ICE) eingeschaltet ist. Wenn Sie die Platine anschließen, wird ein Fenster (und Laufwerk) zugewiesen. (Siehe Fehlerbehebung).
-
Öffnen Sie einen Terminal-Emulator, um die Nachrichten über UART anzuzeigen. Folgen Sie den Anweisungen unter Installieren eines Terminal-Emulators.
-
Führen Sie das Demoprojekt aus, indem Sie die generierte Binärdatei auf das Gerät kopieren.
Wenn Sie das MQTT-Thema mit dem MQTT-Client abonniert haben, sollten Sie die AWS IoT von Ihrem Gerät gesendeten MQTT-Nachrichten in der Konsole sehen. AWS IoT
Fehlerbehebung
-
Wenn Ihr Windows das Gerät nicht erkennt
VCOM, installieren Sie den NuMaker Windows-Treiber für die serielle Schnittstelle über den Link Nu-LinkUSB Driver v1.6. -
Wenn Sie Ihr Gerät über Nu-Link mit dem Keil MDK (IDE) verbinden, stellen Sie sicher, dass der MSG-Schalter (Nr. 4 von on ICE) ausgeschaltet ist, wie in der ISW1 Abbildung gezeigt.
Wenn beim Einrichten Ihrer Entwicklungsumgebung oder beim Herstellen einer Verbindung mit Ihrer Platine Probleme auftreten, wenden Sie sich an Nuvoton
Debuggen von FreeRTOS-Projekten in Keil μVision
So starten Sie eine Debug-Sitzung in Keil µVision
-
Öffnen Sie Keil µVision.
-
Folgen Sie den Schritten, um das FreeRTOS-Demo-Projekt einzubauen. Erstellen Sie das FreeRTOS-Demoprojekt und führen Sie es aus
-
Wählen Sie im Menü Debug (Debuggen) die Option Start/Stop Debug Session (Debug-Sitzung starten/stoppen).
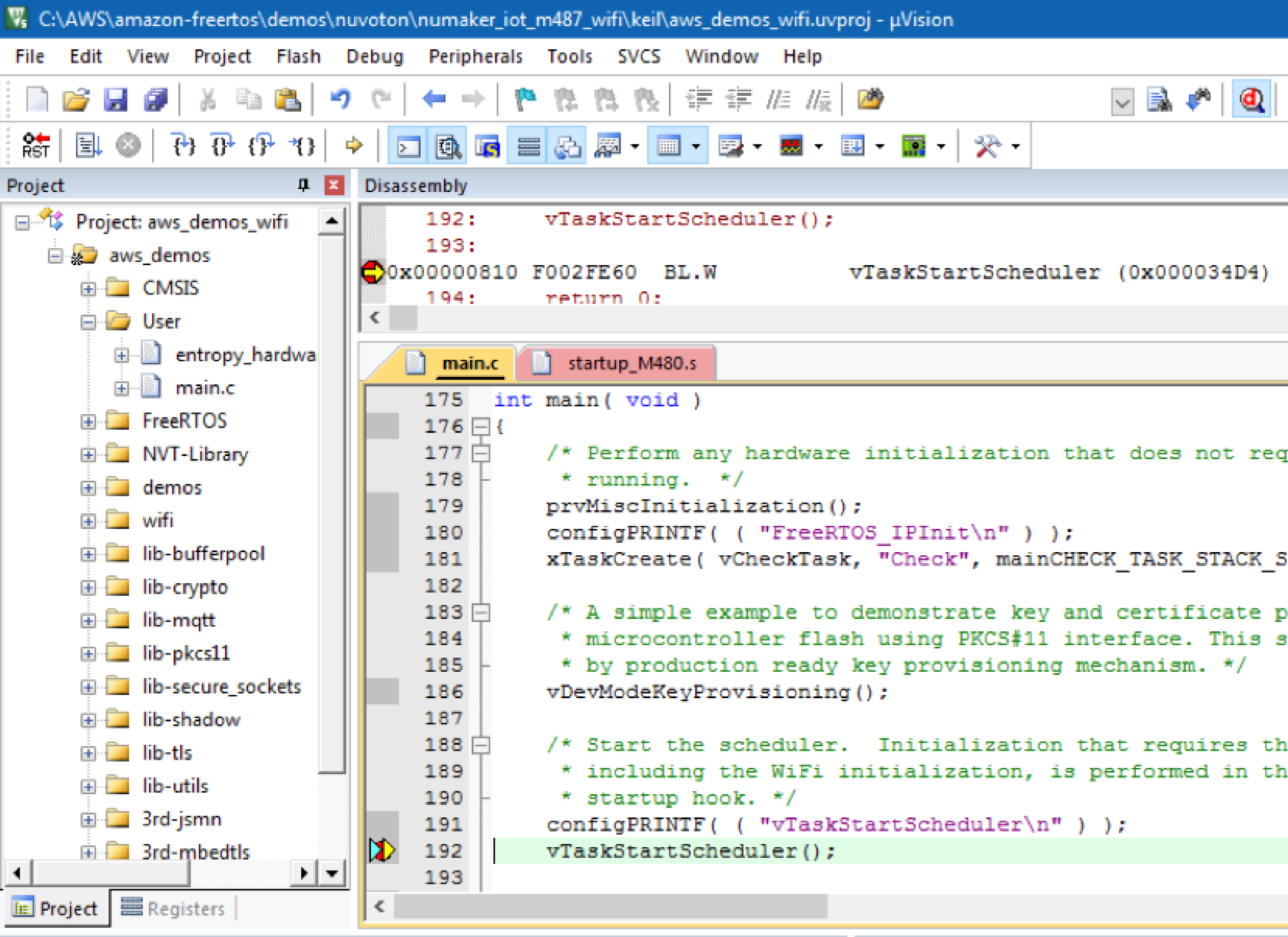
Das Fenster Call Stack+ Locals (Aufruf-Stack und Lokale) wird angezeigt, wenn Sie eine Debug-Sitzung starten. µVision flasht die Demo auf die Platine, führt die Demo aus und stoppt am Anfang der
main()-Funktion. -
Legen Sie Haltepunkte im Quellcode Ihres Projekts fest und führen Sie dann den Code aus. Das Projekt sollte wie folgt aussehen:
Fehlerbehebung für Debug-Einstellungen von µVision
Wenn beim Debuggen einer Anwendung Probleme auftreten, überprüfen Sie, ob Ihre Debug-Einstellungen in Keil µVision korrekt sind.
So überprüfen Sie, ob die Debug-Einstellungen von µVision korrekt sind
-
Öffnen Sie Keil µVision.
-
Klicken Sie mit der rechten Maustaste auf das
aws_demo-Projekt in der IDE und wählen Sie dann Options (Optionen)aus. -
Stellen Sie sicher, dass auf der Registerkarte Utilities (Dienstprogramme) die Option Use Target Driver for Flash Programming (Zieltreiber für Flash-Programmierung verwenden) ausgewählt ist, und dass Nuvoton Nu-Link Debugger als Zieltreiber festgelegt ist.
-
Wählen Sie auf der Registerkarte Debug (Debuggen) neben Nuvoton Nu-Link Debugger die Option Settings (Einstellungen).
-
Stellen Sie sicher, dass der Chip Type (Chiptyp) auf M480 festgelegt ist.
