Las traducciones son generadas a través de traducción automática. En caso de conflicto entre la traducción y la version original de inglés, prevalecerá la version en inglés.
Calibre su vehículo de AWS DeepRacer
Para lograr el mejor rendimiento, es esencial que calibre algunas partes físicas de su DeepRacer vehículo de AWS. Si utiliza un vehículo no calibrado, puede añadir incertidumbre al probar su modelo. Si las prestaciones del vehículo no son óptimas, es posible que se vea tentado a adaptar únicamente el código del modelo de aprendizaje profundo. Sin embargo, no podrá mejorar el desempeño del vehículo si la causa es mecánica. Ajuste los mecanismos mediante la calibración.
Para calibrar su DeepRacer vehículo de AWS, defina el rango del ciclo
La velocidad máxima y ángulo de giro definen la extensión del espacio de acción. Puede especificar la velocidad máxima y el ángulo de giro máximo durante el entrenamiento en la simulación. Al implementar el modelo entrenado en su DeepRacer vehículo de AWS para conducir en una pista del mundo real, la velocidad máxima y el ángulo de dirección del vehículo deben calibrarse para que coincidan con los utilizados en el entrenamiento de simulación.
Para asegurarse de que las experiencias en el mundo real coincidan con las experiencias simuladas, debe calibrar el vehículo para que los valores de velocidad máxima y ángulo de giro máximo coincidan en la simulación y en el mundo real. En general, hay dos formas de calibrar:
-
Definir el espacio de acción en el entrenamiento y calibrar el vehículo físico para que coincida con la configuración.
-
Medir el desempeño real del vehículo y cambiar la configuración del espacio de acción en la simulación.
Un modelo sólido puede gestionar determinadas diferencias entre la simulación y el mundo real. Sin embargo, debería probar ambos enfoques e iterar para lograr los mejores resultados.
Antes de comenzar con la calibración, active el módulo de cómputo. Cuando esté activo y el LED muestre un color azul sólido, encienda la batería del vehículo. Después de oír dos pitidos cortos y uno largo, ya podrá empezar con la calibración.
Para calibrar su DeepRacer vehículo de AWS para que coincida con la configuración de entrenamiento:
-
Siga estas instrucciones para acceder a su vehículo y abra la consola de control del dispositivo.
-
Seleccione Calibración en el panel de navegación principal.
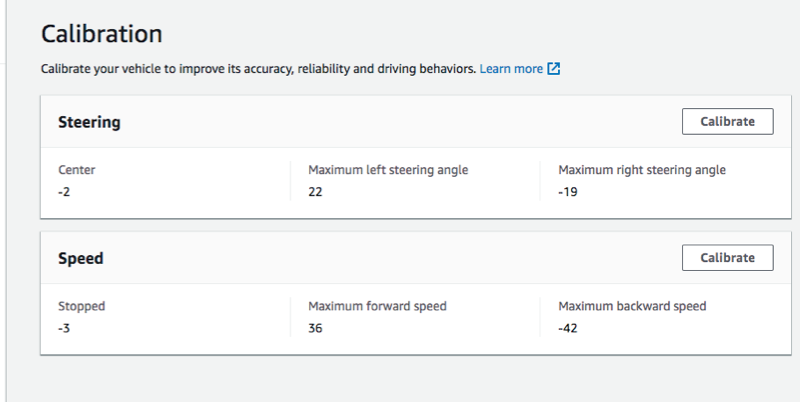
-
En la página Calibración, seleccione Calibrar en Dirección y luego siga los pasos que se indican a continuación para calibrar los ángulos de giro del vehículo.
-
Ponga el vehículo en el suelo u otra superficie dura donde pueda ver las ruedas durante la calibración de la dirección. Elija Next (Siguiente).
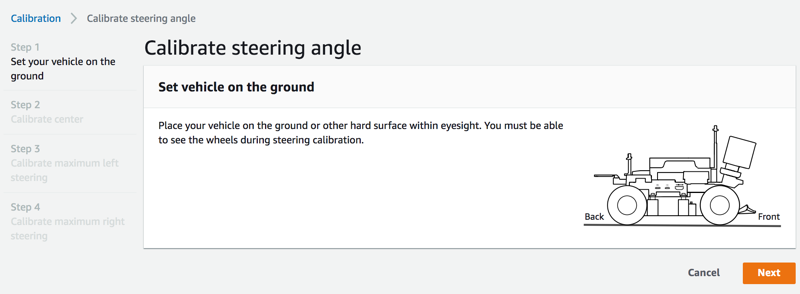
Al dirigir un vehículo por una pista, se requieren unos ángulos de giro mucho más estrechos que al girar las ruedas en el aire. Para medir los ángulos de giro reales de las ruedas, es importante que coloque el vehículo sobre la superficie de la pista.
-
En Dirección central, mueva gradualmente el control deslizante o pulse sobre la flecha hacia la izquierda o la derecha hasta llegar a la posición en la que al menos una de las ruedas delanteras esté alineada con la rueda trasera del mismo lado. Elija Next (Siguiente).
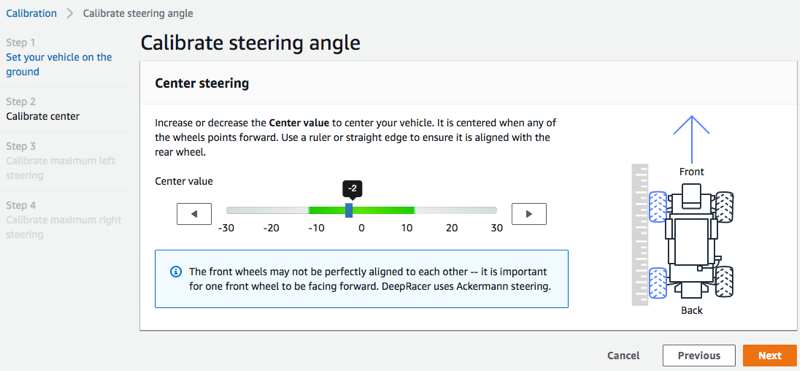
AWS DeepRacer utiliza la dirección de las ruedas delanteras de Ackermann
para girar las ruedas dentro y fuera de una curva. Esto significa que las ruedas delanteras izquierda y derecha, por lo general, giran en ángulos diferentes. En AWS DeepRacer, la calibración se realiza en el valor central. Por lo tanto, debe ajustar las ruedas del lado elegido para que queden alineadas formando una línea recta. nota
Asegúrese de calibrar bien su DeepRacer vehículo de AWS para que pueda mantener la dirección central lo más recta posible. Puede probar esto de forma manual empujando el vehículo para comprobar si va en línea recta.
-
En Giro máximo a la izquierda, mueva gradualmente el control deslizante hacia la izquierda o pulse sobre la flecha hacia la izquierda hasta que las ruedas delanteras del vehículo dejen de girar hacia la izquierda. Oirá un ruido amortiguado. Si oye un ruido fuerte, habrá ido demasiado lejos. La posición se corresponde con el ángulo de giro máximo hacia la izquierda. Si ha limitado su ángulo de giro en el espacio de acción simulado, indique el valor correspondiente aquí. Elija Next (Siguiente).
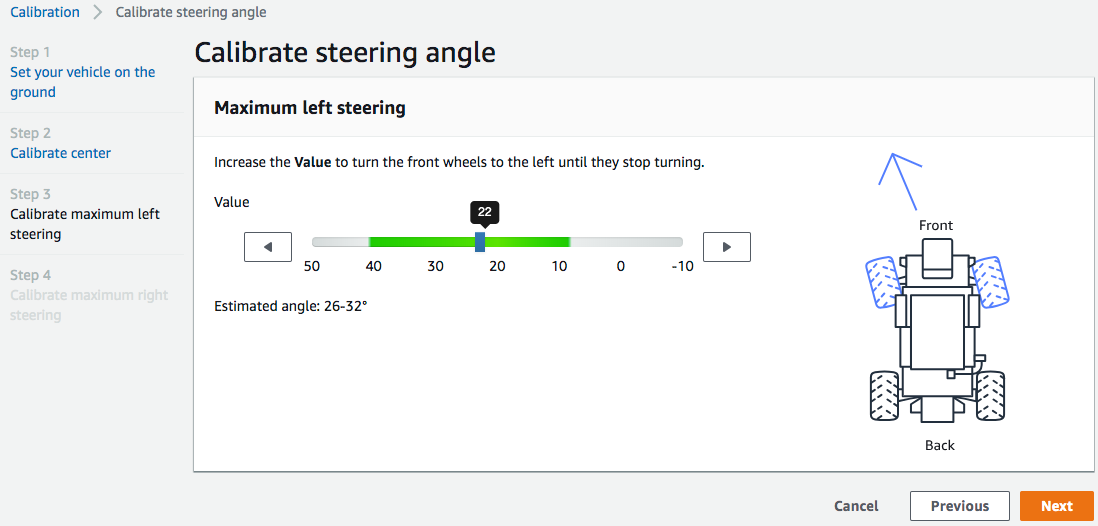
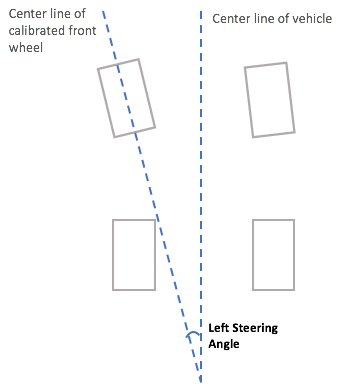
Para medir el ángulo de giro máximo real hacia la izquierda, dibuje una línea central para el vehículo, marque los dos extremos de la rueda delantera seleccionada para la calibración y dibuje la línea central de dicha rueda delantera hasta que se cruce con la línea central del vehículo. Utilice un transportador para medir el ángulo. Consulte la imagen que sigue. Si desea que el ángulo real coincida con el del entrenamiento, puede establecer el mismo valor en el espacio de acción en su próximo trabajo de entrenamiento.
-
En Giro máximo a la derecha, mueva gradualmente el control deslizante hacia la derecha hasta que las ruedas delanteras elegidas dejen de girar hacia la derecha. Oirá un ruido amortiguado. Si oye un ruido fuerte, habrá ido demasiado lejos. La posición se corresponde con el ángulo de giro máximo hacia la derecha. Si ha limitado su ángulo de giro en el espacio de acción simulado, indique el valor correspondiente aquí. Seleccione Listo.
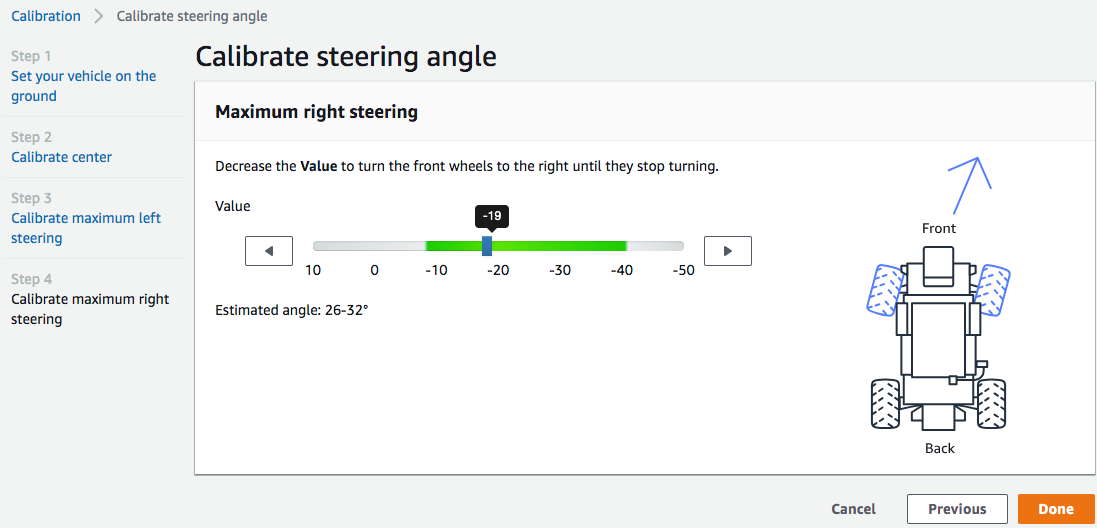
Para medir el ángulo de giro máximo real hacia la derecha, siga los pasos que son similares a los utilizados para medir el ángulo de giro máximo hacia la izquierda.
Con esto finaliza la calibración de la dirección de su DeepRacer vehículo de AWS.
-
-
Para calibrar la velocidad máxima del vehículo, en la página Calibración, seleccione Calibrar en Velocidad y siga los siguientes pasos.
-
Levante el vehículo para que las ruedas puedan girar libremente. Elija Siguiente en la consola de control del dispositivo.
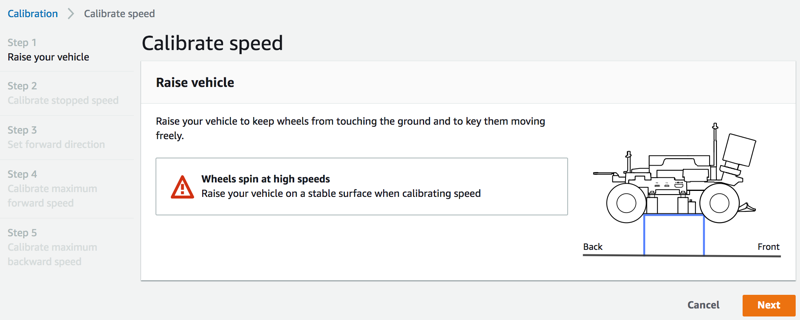
nota
Si la velocidad del vehículo es demasiado alta, puede ir demasiado rápido durante la calibración y provocar daños en el entorno, en el vehículo o a la gente que esté presente. Debe aumentar la velocidad del vehículo, tal como se indica aquí, pero no debe sujetarlo con las manos.
-
Para calibrar la velocidad de parada, pulse sobre la flecha hacia la izquierda o la derecha para modificar gradualmente el Valor de parada bajo Velocidad de parada en la consola de control del dispositivo hasta que las ruedas dejen de rodar. Elija Next (Siguiente).
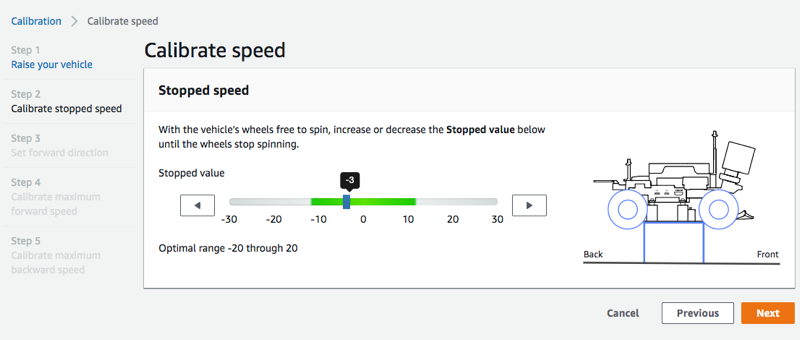
nota
Al pulsar sobre el Valor de parada más hacia la izquierda o hacia la derecha del valor empezará a oír un ruido que significa que las ruedas empezarán a girar. El punto de aceleración cero ideal es el punto medio entre los dos valores. Por ejemplo, si empieza a oír un ruido con el valor 16 a la izquierda y -4 a la derecha, el valor de parada óptimo debería ser 10.
-
Para establecer la dirección hacia delante del vehículo, colóquelo tal y como se muestra en la pantalla y la imagen y, a continuación, pulse sobre la flecha hacia la izquierda o la derecha para hacer girar las ruedas. Si las ruedas giran en el sentido de las agujas del reloj, se habrá establecido la dirección hacia delante. De lo contrario, mueva el control deslizante Invertir dirección. Elija Next (Siguiente).
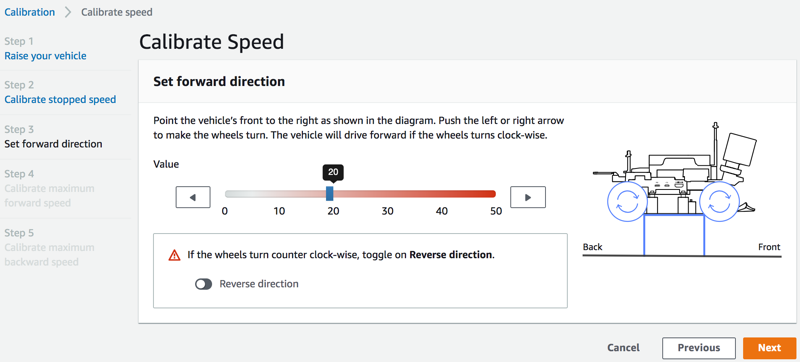
nota
Es posible que los vehículos distribuidos en AWS re:Invent 2018 tengan la dirección de avance invertida. En ese caso, mueva el control deslizante Invertir dirección.
-
Para calibrar la velocidad máxima hacia delante, en Velocidad máxima hacia delante, mueva el control deslizante suavemente hacia la izquierda o la derecha para ajustar el número del Valor de la velocidad máxima hacia delante gradualmente hasta alcanzar un valor positivo de Velocidad estimada que sea igual o similar a la velocidad máxima indicada en la simulación. Elija Next (Siguiente).
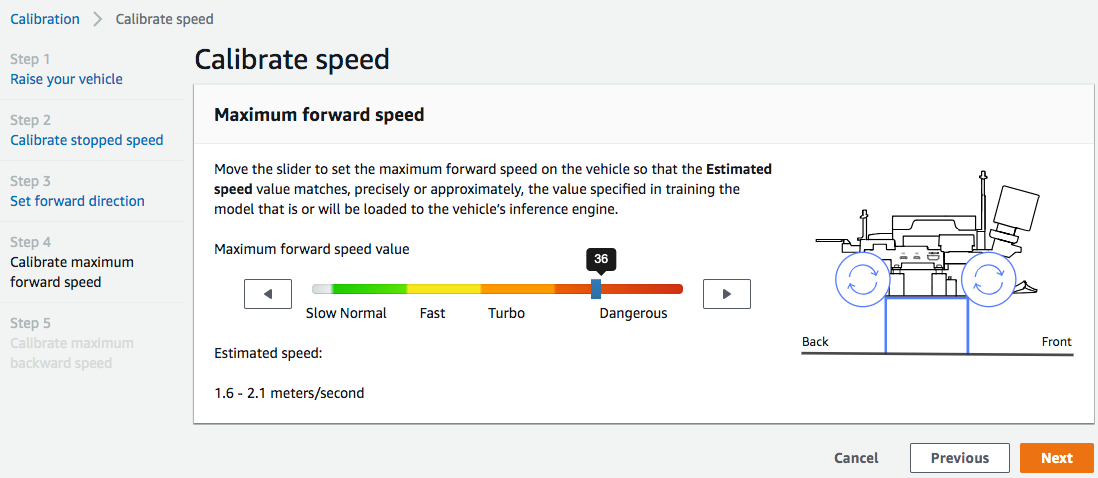
nota
La velocidad máxima real de su vehículo dependerá de la fricción de la superficie de la pista, así como del nivel de carga de la batería del vehículo. Para que sea flexible, puede configurar el límite de aceleración del vehículo entre un 20 y un 30 % superior a la velocidad máxima especificada para el entrenamiento durante la simulación. En términos generales, el valor de velocidad máxima debería estar dentro del área verde. Encima, es probable que el vehículo vaya demasiado rápido por lo que se puede romper. Además, el espacio de acción para el entrenamiento no admite una velocidad máxima de más de 2 m/s.
-
Para calibrar la velocidad máxima marcha atrás Velocidad máxima marcha atrás, mueva el control deslizante suavemente hacia la izquierda o la derecha para ajustar el número del Valor de la velocidad máxima marcha atrás gradualmente hasta alcanzar un valor negativo de EVelocidad estimada que sea igual o similar a la velocidad máxima indicada en la simulación. Seleccione Listo.
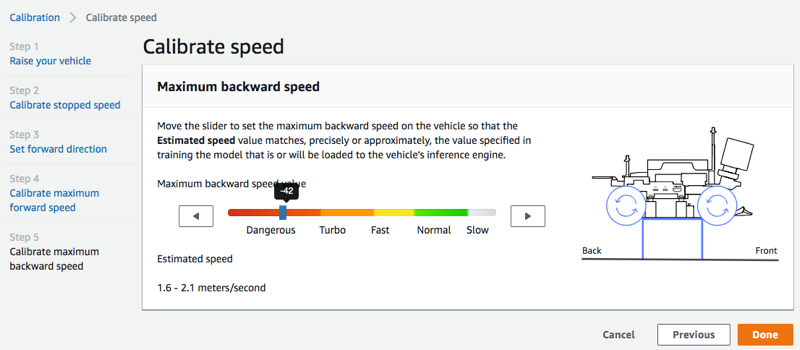
nota
El DeepRacer vehículo de AWS no utiliza la velocidad de retroceso en el modo de conducción autónoma. Puede establecer la velocidad marcha atrás en cualquier valor con el que pueda controlar cómodamente el modo de conducción manual del vehículo.
Con esto concluye la calibración de la velocidad máxima de su DeepRacer vehículo de AWS.
-
