Terjemahan disediakan oleh mesin penerjemah. Jika konten terjemahan yang diberikan bertentangan dengan versi bahasa Inggris aslinya, utamakan versi bahasa Inggris.
Kalibrasi kendaraan AWS DeepRacer Anda
Untuk mencapai kinerja terbaik, Anda harus mengkalibrasi beberapa bagian fisik DeepRacer kendaraan AWS Anda. Jika Anda menggunakan kendaraan yang tidak dikalibrasi, itu bisa menambah ketidakpastian saat menguji model Anda. Jika performa kendaraan tidak optimal, Anda mungkin tertarik untuk hanya menyesuaikan kode model deep learning. Namun, Anda tidak akan dapat meningkatkan performa kendaraan jika akar masalah bersifat mekanis. Sesuaikan mekanik dengan kalibrasi.
Untuk mengkalibrasi DeepRacer kendaraan AWS Anda, tetapkan rentang siklus kerja
Kecepatan maksimum dan sudut kemudi mendefinisikan rentang ruang tindakan. Anda dapat menentukan kecepatan maksimum dan sudut kemudi maksimum selama pelatihan simulasi. Saat menerapkan model terlatih ke DeepRacer kendaraan AWS Anda untuk mengemudi di trek dunia nyata, kecepatan maksimum dan sudut kemudi kendaraan harus dikalibrasi agar sesuai dengan yang digunakan dalam pelatihan simulasi.
Untuk memastikan bahwa pengalaman dunia nyata sesuai dengan pengalaman simulasi, Anda harus mengkalibrasi kendaraan Anda agar sesuai dengan kecepatan maksimum dan sudut kemudi maksimum antara simulasi dan dunia nyata. Secara umum, ada dua cara untuk melakukan kalibrasi ini:
-
Tentukan ruang tindakan dalam pelatihan dan kalibrasi kendaraan fisik agar sesuai dengan pengaturan.
-
Ukur performa sebenarnya kendaraan Anda dan ubah pengaturan ruang tindakan dalam simulasi.
Sebuah model yang tangguh dapat menangani perbedaan tertentu antara simulasi dan dunia nyata. Namun, Anda harus bereksperimen dengan pendekatan dan iterasi untuk menemukan hasil terbaik.
Sebelum memulai kalibrasi, nyalakan modul komputasi. Setelah dimulai dan LED daya telah berubah menjadi biru solid, nyalakan baterai kendaraan. Setelah Anda mendengar dua bunyi bip pendek dan satu bunyi bip panjang, Anda siap untuk melanjutkan kalibrasi.
Untuk mengkalibrasi DeepRacer kendaraan AWS Anda agar sesuai dengan pengaturan pelatihan:
-
Ikuti Instruksi ini untuk mengakses kendaraan Anda dan membuka konsol kontrol perangkat.
-
Pilih Kalibrasi dari panel navigasi utama.

-
Di halaman Kalibrasi, pilih Kalibrasi di Kemudi, lalu ikuti langkah-langkah di bawah ini untuk mengkalibrasi sudut kemudi maksimum kendaraan.
-
Atur kendaraan di darat atau permukaan keras lainnya di tempat Anda dapat melihat roda selama kalibrasi kemudi. Pilih Berikutnya.
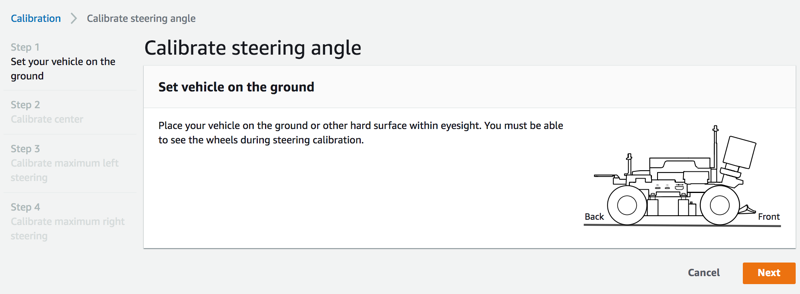
Mengemudi kendaraan di lintasan membutuhkan sudut kemudi yang jauh lebih kecil daripada memutar roda di udara. Untuk mengukur sudut kemudi sebenarnya dari roda, penting bagi Anda untuk menempatkan kendaraan di permukaan lintasan.
-
Di dalam Kemudi tengah, secara bertahap gerakkan slider atau tekan panah kiri atau kanan ke posisi tempat setidaknya satu roda depan sejajar dengan roda belakang di sisi yang sama. Pilih Berikutnya.
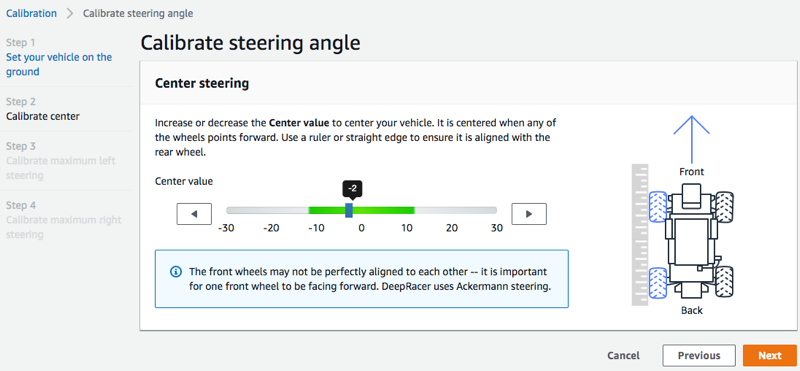
AWS DeepRacer menggunakan kemudi roda depan Ackermann
untuk memutar roda di bagian dalam dan luar belokan. Ini berarti roda depan kiri dan kanan umumnya berputar pada sudut yang berbeda. Di AWS DeepRacer, kalibrasi dilakukan pada nilai tengah. Sehingga, Anda perlu menyesuaikan roda pada sisi yang dipilih agar sejajar dalam garis lurus. catatan
Pastikan untuk mengkalibrasi DeepRacer kendaraan AWS Anda dengan baik sehingga dapat mempertahankan kemudi tengah selurus mungkin. Anda dapat menguji ini dengan mendorong kendaraan secara manual untuk memverifikasi itu mengikuti jalur yang lurus.
-
Di dalam Kemudi kiri maksimum, secara bertahap gerakkan slider ke kiri atau tekan panah kiri sampai roda depan kendaraan berhenti berbelok ke kiri. Akan ada suara yang tenang. Jika Anda mendengar suara keras, Anda telah pergi terlalu jauh. Posisi sesuai dengan sudut kemudi kiri maksimum. Jika Anda telah membatasi sudut kemudi Anda di ruang tindakan simulasi, cocokkan nilai yang sesuai di sini. Pilih Berikutnya.
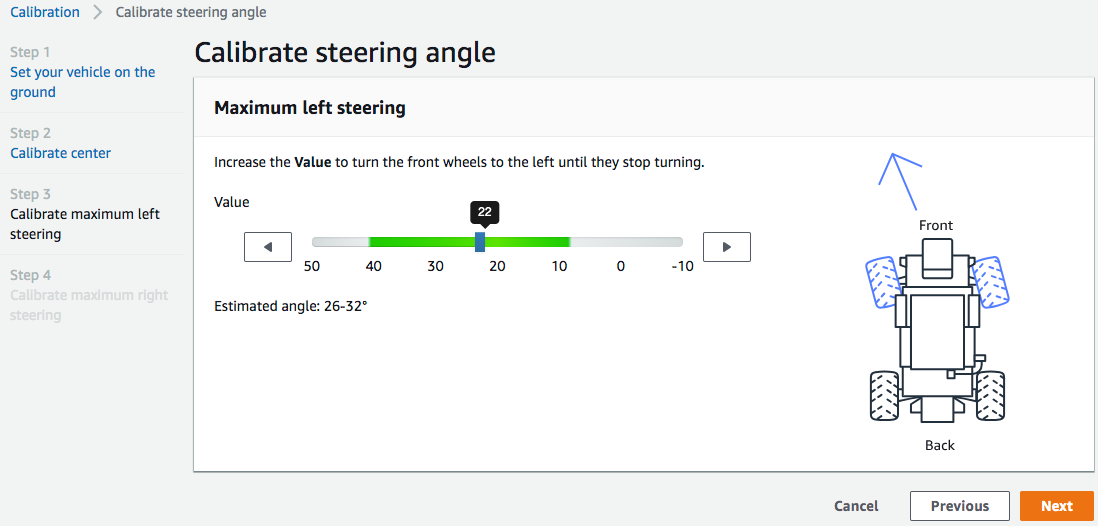
Untuk mengukur sudut kemudi kiri maksimum yang sebenarnya, gambarlah garis tengah untuk kendaraan, tandai dua titik tepi roda depan yang dipilih untuk kalibrasi, dan gambarlah garis tengah roda depan ini hingga melintasi garis tengah kendaraan. Gunakan busur derajat untuk mengukur sudutnya. Lihat gambar di bawah ini. Jika Anda ingin mencocokkan sudut sebenarnya dalam pelatihan Anda, Anda dapat mengatur nilai yang sama dalam ruang tindakan di tugas pelatihan berikutnya.

-
Di dalam Kemudi kanan maksimum, secara bertahap pindahkan slider ke kanan hingga roda depan yang dipilih berhenti berbelok ke kanan. Akan ada suara yang tenang. Jika Anda mendengar suara keras, Anda telah pergi terlalu jauh. Posisi sesuai dengan sudut kemudi kanan maksimum. Jika Anda telah membatasi sudut kemudi Anda di ruang tindakan simulasi, cocokkan nilai yang sesuai di sini. Pilih Selesai.
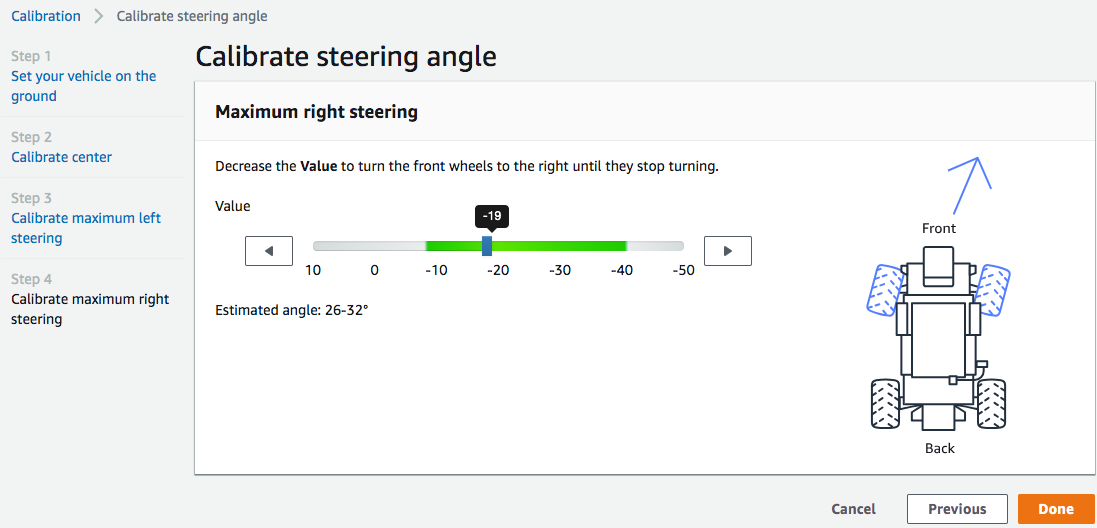
Untuk mengukur sudut kemudi kanan maksimum yang sebenarnya, ikuti langkah-langkah yang serupa dengan yang digunakan untuk mengukur sudut kemudi kiri maksimum.
Ini menyimpulkan kalibrasi kemudi untuk kendaraan DeepRacer AWS Anda.
-
-
Untuk mengkalibrasi kecepatan maksimum kendaraan, pilih Kalibrasi di Kecepatan pada halaman Kalibrasi lalu ikuti langkah-langkah di bawah ini.
-
Angkat kendaraan agar roda bebas berputar. Pilih Selanjutnya pada konsol kontrol perangkat.

catatan
Jika kecepatan kendaraan telah diatur terlalu tinggi, kecepatan kendaraan mungkin berjalan terlalu cepat selama kalibrasi dan menyebabkan kerusakan pada lingkungan, kendaraan, atau orang lain di sekitar. Anda harus mengangkat kendaraan, seperti yang diperintahkan di sini, tetapi tidak memegangnya di tangan Anda.
-
Untuk mengkalibrasi kecepatan berhenti, tekan panah kiri atau kanan untuk secara bertahap mengubah Nilai yang terhenti di dalam Kecepatan yang terhenti pada konsol kontrol perangkat hingga roda berhenti berputar. Pilih Berikutnya.

catatan
Saat menekan Nilai yang terhenti lebih jauh ke kiri atau kanan untuk nilai ketika Anda mulai mendengar suara, roda akan bergerak. Titik nol throttle yang ideal adalah nilai tengah dari dua nilai. Misalnya, jika Anda mulai mendengar suara di 16 sebelah kiri dan di -4 di sebelah kanan, nilai yang berhenti optimal harus 10.
-
Untuk mengatur arah depan kendaraan, letakkan kendaraan seperti yang ditunjukkan pada layar dan citra di sini, lalu tekan panah kiri atau kanan untuk membuat roda berputar. Jika roda berbelok searah jarum jam, arah ke depan diatur. Jika tidak, alihkan ke Arahan terbalik. Pilih Berikutnya.

catatan
Kendaraan yang didistribusikan di AWS re:Invent 2018 mungkin memiliki arah depan yang terbalik. Dalam kasus seperti itu, pastikan untuk beralih ke Arahan terbalik.
-
Untuk mengkalibrasi kecepatan depan maksimum, di dalam Kecepatan depan maksimum, gerakkan slider ke kiri atau kanan dengan pelan-pelan untuk menyesuaikan jumlah Nilai kecepatan depan maksimum secara bertahap untuk suatu nilai positif bahwa nilai Estimasi kecepatan sama atau mirip dengan kecepatan maksimum yang ditentukan dalam simulasi. Pilih Berikutnya.

catatan
Kecepatan maksimum sebenarnya kendaraan Anda tergantung pada gesekan permukaan lintasan serta tingkat baterai kendaraan. Untuk membuatnya fleksibel, Anda dapat mengatur batas throttle kendaraan menjadi 20-30 persen lebih tinggi dari kecepatan maksimum yang ditentukan untuk pelatihan simulasi. Secara umum, Anda harus mengatur nilai kecepatan maksimum dalam area hijau. Di atas itu, kendaraan Anda kemungkinan akan mengemudi terlalu cepat pada peningkatan risiko pecah. Selain itu, ruang tindakan untuk pelatihan tidak mendukung kecepatan maksimum lebih dari 2 m/s.
-
Untuk mengkalibrasi kecepatan mundur maksimum, di dalam Kecepatan mundur maksimum, gerakkan slider ke kiri atau kanan dengan pelan-pelan untuk menyesuaikan jumlah Nilai kecepatan mundur maksimum secara bertahap untuk suatu nilai negatif bahwa nilai Estimasi kecepatan sama atau mirip dengan kecepatan maksimum yang ditentukan dalam simulasi. Pilih Selesai.
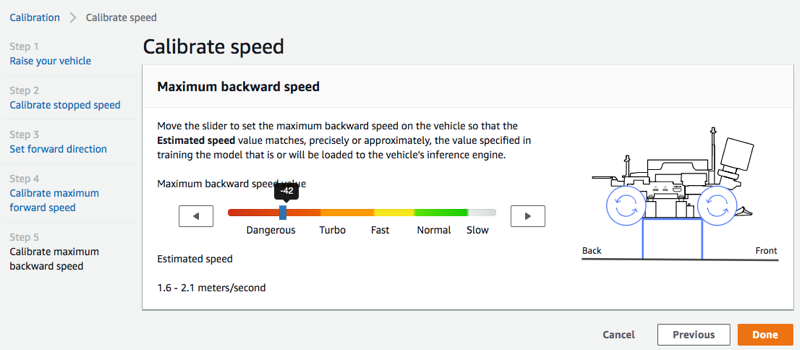
catatan
DeepRacer Kendaraan AWS tidak menggunakan kecepatan mundur dalam mode mengemudi otonom. Anda dapat mengatur kecepatan mundur ke nilai apa pun yang dengan itu Anda dapat mengontrol mode mengemudi manual kendaraan dengan nyaman.
Ini menyimpulkan kalibrasi kecepatan maksimum DeepRacer kendaraan AWS Anda.
-
