Terjemahan disediakan oleh mesin penerjemah. Jika konten terjemahan yang diberikan bertentangan dengan versi bahasa Inggris aslinya, utamakan versi bahasa Inggris.
Parameter masukan fungsi DeepRacer reward AWS
Fungsi AWS DeepRacer reward mengambil objek kamus sebagai input.
def reward_function(params) : reward = ... return float(reward)
Objek kamus params berisi pasangan nilai kunci berikut:
{ "all_wheels_on_track": Boolean, # flag to indicate if the agent is on the track "x": float, # agent's x-coordinate in meters "y": float, # agent's y-coordinate in meters "closest_objects": [int, int], # zero-based indices of the two closest objects to the agent's current position of (x, y). "closest_waypoints": [int, int], # indices of the two nearest waypoints. "distance_from_center": float, # distance in meters from the track center "is_crashed": Boolean, # Boolean flag to indicate whether the agent has crashed. "is_left_of_center": Boolean, # Flag to indicate if the agent is on the left side to the track center or not. "is_offtrack": Boolean, # Boolean flag to indicate whether the agent has gone off track. "is_reversed": Boolean, # flag to indicate if the agent is driving clockwise (True) or counter clockwise (False). "heading": float, # agent's yaw in degrees "objects_distance": [float, ], # list of the objects' distances in meters between 0 and track_length in relation to the starting line. "objects_heading": [float, ], # list of the objects' headings in degrees between -180 and 180. "objects_left_of_center": [Boolean, ], # list of Boolean flags indicating whether elements' objects are left of the center (True) or not (False). "objects_location": [(float, float),], # list of object locations [(x,y), ...]. "objects_speed": [float, ], # list of the objects' speeds in meters per second. "progress": float, # percentage of track completed "speed": float, # agent's speed in meters per second (m/s) "steering_angle": float, # agent's steering angle in degrees "steps": int, # number steps completed "track_length": float, # track length in meters. "track_width": float, # width of the track "waypoints": [(float, float), ] # list of (x,y) as milestones along the track center }
Referensi teknis yang lebih detail dari parameter input adalah sebagai berikut.
all_wheels_on_track
Tipe: Boolean
Kisaran: (True:False)
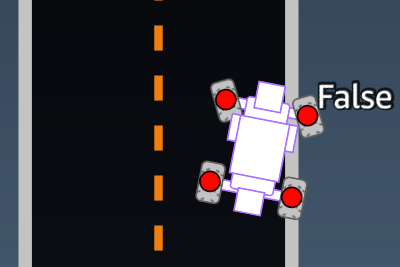
Bendera Boolean menunjukkan apakah agen berada di lintasan atau di luar lintasan. Bendera keluar lintasan (False) jika salah satu roda agen berada di luar batas lintasan. Bendera berada di lintasan (True) jika semua roda berada di dalam dua batas lintasan. Ilustrasi berikut menunjukkan bahwa agen berada di lintasan.

Ilustrasi berikut menunjukkan bahwa agen keluar lintasan.
Contoh: Sebuah fungsi penghargaan yang menggunakan parameter all_wheels_on_track
def reward_function(params): ############################################################################# ''' Example of using all_wheels_on_track and speed ''' # Read input variables all_wheels_on_track = params['all_wheels_on_track'] speed = params['speed'] # Set the speed threshold based your action space SPEED_THRESHOLD = 1.0 if not all_wheels_on_track: # Penalize if the car goes off track reward = 1e-3 elif speed < SPEED_THRESHOLD: # Penalize if the car goes too slow reward = 0.5 else: # High reward if the car stays on track and goes fast reward = 1.0 return float(reward)
closest_waypoints
Tipe: [int, int]
Kisaran: [(0:Max-1),(1:Max-1)]
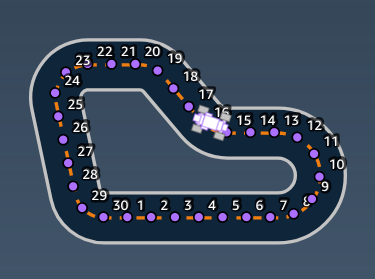
Indeks berbasis nol dari dua waypoint tetangga yang paling dekat dengan posisi agen saat ini dari (x, y). Jarak diukur dengan jarak Euclidean dari pusat agen. Elemen pertama mengacu pada waypoint terdekat di belakang agen dan elemen kedua mengacu pada waypoint terdekat di depan agen. Max adalah panjang daftar titik jalan. Dalam ilustrasi yang ditunjukkan dalam titik arah, closest_waypoints akan menjadi [16, 17].
Contoh: Sebuah fungsi penghargaan menggunakan parameter closest_waypoints.
Contoh fungsi penghargaan berikut menunjukkan cara menggunakan waypoints dan closest_waypoints serta heading untuk menghitung penghargaan langsung.
AWS DeepRacer mendukung pustaka berikut: matematika, acak,, NumPy SciPy, dan Shapely. Untuk menggunakannya, tambahkan pernyataan impor, import , di atas definisi fungsi Anda, supported librarydef function_name(parameters).
# Place import statement outside of function (supported libraries: math, random, numpy, scipy, and shapely) # Example imports of available libraries # # import math # import random # import numpy # import scipy # import shapely import math def reward_function(params): ############################################################################### ''' Example of using waypoints and heading to make the car point in the right direction ''' # Read input variables waypoints = params['waypoints'] closest_waypoints = params['closest_waypoints'] heading = params['heading'] # Initialize the reward with typical value reward = 1.0 # Calculate the direction of the center line based on the closest waypoints next_point = waypoints[closest_waypoints[1]] prev_point = waypoints[closest_waypoints[0]] # Calculate the direction in radius, arctan2(dy, dx), the result is (-pi, pi) in radians track_direction = math.atan2(next_point[1] - prev_point[1], next_point[0] - prev_point[0]) # Convert to degree track_direction = math.degrees(track_direction) # Calculate the difference between the track direction and the heading direction of the car direction_diff = abs(track_direction - heading) if direction_diff > 180: direction_diff = 360 - direction_diff # Penalize the reward if the difference is too large DIRECTION_THRESHOLD = 10.0 if direction_diff > DIRECTION_THRESHOLD: reward *= 0.5 return float(reward)
closest_objects
Tipe: [int, int]
Kisaran: [(0:len(objects_location)-1),
(0:len(objects_location)-1)]
Indeks berbasis-nol dari dua objek terdekat dengan posisi agen saat ini (x, y). Indeks pertama mengacu pada objek terdekat di belakang agen, dan indeks kedua mengacu pada objek terdekat di depan agen. Jika hanya ada satu objek, kedua indeks adalah 0.
distance_from_center
Tipe: float
Kisaran: 0:~track_width/2
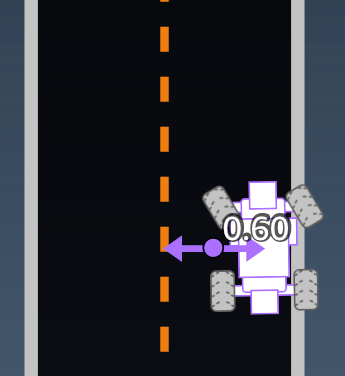
Perpindahan, dalam satuan meter, antara pusat agen dan pusat lintasan. Perpindahan maksimum yang dapat diamati terjadi ketika salah satu roda agen berada di luar batas lintasan dan, tergantung pada lebar batas lintasan, dapat sedikit lebih kecil atau lebih besar dari setengah track_width.
Contoh: Sebuah fungsi penghargaan yang menggunakan parameter distance_from_center
def reward_function(params): ################################################################################# ''' Example of using distance from the center ''' # Read input variable track_width = params['track_width'] distance_from_center = params['distance_from_center'] # Penalize if the car is too far away from the center marker_1 = 0.1 * track_width marker_2 = 0.5 * track_width if distance_from_center <= marker_1: reward = 1.0 elif distance_from_center <= marker_2: reward = 0.5 else: reward = 1e-3 # likely crashed/ close to off track return float(reward)
menuju
Tipe: float
Kisaran: -180:+180
Arah tujuan, dalam satuan derajat, dari agen yang sehubungan dengan sumbu x dari sistem koordinat.

Contoh: Sebuah fungsi penghargaan yang menggunakan parameter heading
Untuk informasi selengkapnya, lihat closest_waypoints.
is_crashed
Tipe: Boolean
Kisaran: (True:False)
Bendera Boolean untuk menunjukkan apakah agen telah menabrak objek lain (True) atau tidak (False) sebagai status pengakhiran.
is_left_of_center
Tipe: Boolean
Kisaran: [True : False]
Bendera Boolean untuk menunjukkan jika agen berada di sisi kiri pusat lintasan (True) atau di sisi kanan (False).
is_offtrack
Tipe: Boolean
Kisaran: (True:False)
Bendera Boolean untuk menunjukkan apakah agen memiliki off track (Betul) atau tidak (Salah) sebagai status pengakhiran.
is_reversed
Tipe: Boolean
Kisaran: [True:False]
Bendera Boolean untuk menunjukkan jika agen mengemudi searah jarum jam (Betul) atau tidak searah jarum jam (Salah).
Bendera ini digunakan saat Anda mengaktifkan perubahan arah untuk setiap episode.
objects_distance
Tipe: [float, … ]
Kisaran: [(0:track_length), … ]
Daftar jarak antara objek di lingkungan dalam kaitannya dengan garis mulai. Elemen ith mengukur jarak dalam meter antara objek ith dan garis mulai di sepanjang garis tengah lintasan.
catatan
abs | (var1) - (var2) | = seberapa dekat mobil ke suatu objek, WHEN var1 = ["objects_distance"][index] and var2 = params["progress"]*params["track_length"]
Untuk mendapatkan indeks objek terdekat di depan kendaraan dan di belakang kendaraan, gunakan parameter "closest_objects".
objects_heading
Tipe: [float, … ]
Kisaran: [(-180:180), … ]
Daftar judul objek dalam satuan derajat. Elemen ith mengukur heading objek ith. Untuk benda stasioner, judulnya adalah 0. Untuk kendaraan bot, nilai elemen yang sesuai adalah sudut judul kendaraan.
objects_left_of_center
Tipe: [Boolean, … ]
Kisaran: [True|False, … ]
Daftar bendera Boolean. Nilai elemen ith menunjukkan apakah objek ith berada di sisi kiri (Betul) atau kanan (Salah) pusat lintasan.
objects_location
Tipe: [(x,y), … ]
Kisaran: [(0:N,0:N), … ]
Daftar semua lokasi objek, setiap lokasi adalah tupel dari (x, y).
Ukuran daftar sama dengan jumlah objek di lintasan. Perhatikan, objeknya bisa berupa rintangan stasioner, kendaraan bot yang bergerak.
objects_speed
Tipe: [float, … ]
Kisaran: [(0:12.0), … ]
Daftar kecepatan (meter per detik) untuk objek di lintasan. Untuk benda stasioner, kecepatannya 0. Untuk kendaraan bot, nilainya adalah kecepatan yang Anda atur dalam pelatihan.
kemajuan
Tipe: float
Kisaran: 0:100
Persentase lintasan selesai.
Contoh: Sebuah fungsi penghargaan yang menggunakan parameter progress
Untuk informasi selengkapnya, lihat langkah-langkah.
kecepatan
Tipe: float
Kisaran: 0.0:5.0
Kecepatan agen yang diamati, dalam meter per detik (m/s).

Contoh: Sebuah fungsi penghargaan yang menggunakan parameter speed
Untuk informasi selengkapnya, lihat all_wheels_on_track.
steering_angle
Tipe: float
Kisaran: -30:30
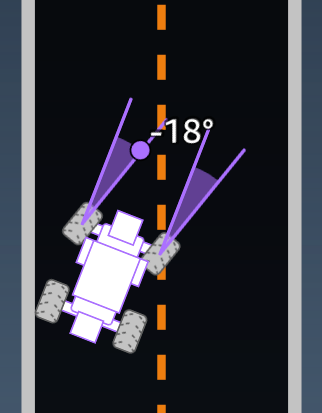
Sudut kemudi, dalam satuan derajat, dari roda depan garis tengah agen. Tanda negatif (-) berarti kemudi ke kanan dan tanda positif (+) berarti kemudi ke kiri. Garis tengah agen tidak harus sejajar dengan garis tengah lintasan seperti yang ditunjukkan pada ilustrasi berikut.
Contoh: Sebuah fungsi penghargaan yang menggunakan parameter steering_angle
def reward_function(params): ''' Example of using steering angle ''' # Read input variable abs_steering = abs(params['steering_angle']) # We don't care whether it is left or right steering # Initialize the reward with typical value reward = 1.0 # Penalize if car steer too much to prevent zigzag ABS_STEERING_THRESHOLD = 20.0 if abs_steering > ABS_STEERING_THRESHOLD: reward *= 0.8 return float(reward)
langkah
Tipe: int
Kisaran: 0:Nstep
Jumlah langkah selesai. Sebuah langkah sesuai dengan tindakan yang diambil oleh agen mengikuti kebijakan saat ini.
Contoh: Sebuah fungsi penghargaan yang menggunakan parameter steps
def reward_function(params): ############################################################################# ''' Example of using steps and progress ''' # Read input variable steps = params['steps'] progress = params['progress'] # Total num of steps we want the car to finish the lap, it will vary depends on the track length TOTAL_NUM_STEPS = 300 # Initialize the reward with typical value reward = 1.0 # Give additional reward if the car pass every 100 steps faster than expected if (steps % 100) == 0 and progress > (steps / TOTAL_NUM_STEPS) * 100 : reward += 10.0 return float(reward)
track_length
Tipe: float
Kisaran: [0:Lmax]
Panjang lintasan dalam satuan meter. Lmax is track-dependent.
track_width
Tipe: float
Kisaran: 0:Dtrack
Lebar lintasan dalam satuan meter.

Contoh: Sebuah fungsi penghargaan yang menggunakan parameter track_width
def reward_function(params): ############################################################################# ''' Example of using track width ''' # Read input variable track_width = params['track_width'] distance_from_center = params['distance_from_center'] # Calculate the distance from each border distance_from_border = 0.5 * track_width - distance_from_center # Reward higher if the car stays inside the track borders if distance_from_border >= 0.05: reward = 1.0 else: reward = 1e-3 # Low reward if too close to the border or goes off the track return float(reward)
x, y
Tipe: float
Kisaran: 0:N
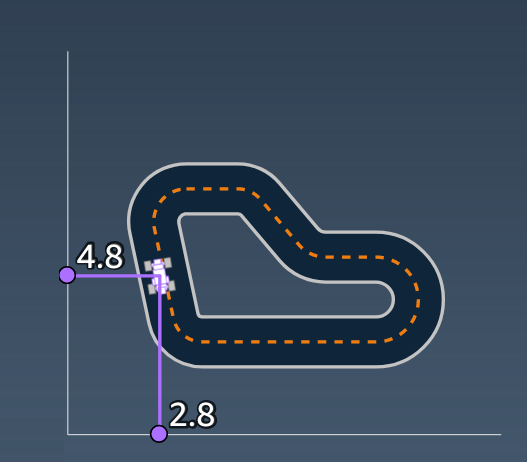
Lokasi, dalam satuan meter, dari pusat agen di sepanjang sumbu x dan y, dari lingkungan simulasi yang berisi lintasan. Asal berada di sudut kiri bawah lingkungan simulasi.
titik arah
Tipe: list dari [float, float]
Kisaran: [[xw,0,yw,0] …
[xw,Max-1,
yw,Max-1]]
Daftar urutan tonggak Max yang bergantung pada lintasan di sepanjang pusat lintasan. Setiap tonggak digambarkan dengan koordinat (xw,i, yw,i). Untuk lintasan melingkar, waypoint pertama dan terakhir adalah sama. Untuk lintasan lurus atau tidak melingkar lainnya, waypoint pertama dan terakhir berbeda.
Contoh Sebuah fungsi penghargaan yang menggunakan parameter waypoints
Untuk informasi selengkapnya, lihat closest_waypoints.
