本文属于机器翻译版本。若本译文内容与英语原文存在差异,则一律以英文原文为准。
校准您的 AWS 车辆 DeepRacer
要获得最佳性能,必须校准 AWS DeepRacer 车辆的某些物理部件。如果您使用未校准的车辆,在测试模型时会增加不确定性。如果车辆的表现情况不佳,您可能会被误导仅去调整深度学习模型代码。但是,如果造成问题的根本原因是机械性能,您将无法改善车辆表现。通过校准来调整机械性能。
要校准 AWS DeepRacer 车辆,请分别为车辆的电子控制系统 (ECS) 及其伺服机构 (伺服) 设置占空
最大速度和转向角度定义了操作空间的跨度。您可以在模拟中的训练期间,指定最大速度和最大转向角度。将经过训练的模型部署到您的 AWS DeepRacer 车辆上以便在真实赛道上行驶时,必须校准车辆的最大速度和转向角度,使其与模拟训练中使用的速度和转向角度相匹配。
为确保真实环境下的经验与模拟经验相匹配,您应该校准车辆,使得模拟与真实世界中的最大速度和最大转向角度相匹配。通常可通过两种方式进行此校准:
-
在训练中定义操作空间,校准实际车辆与这些设置相匹配。
-
测量车辆的实际性能,然后在模拟中更改操作空间的设置。
一个稳健的模型可以处理模拟与真实世界之间的某些差异。但是,您应该使用任何一种方法进行实验并反复进行,以找到最佳结果。
开始校准之前,请打开计算模块。在启动模块之后,电源 LED 应为长亮蓝色,接通车辆电池。在听到两短一长的蜂鸣声后,您已准备好继续校准。
要校准 AWS DeepRacer 车辆以匹配训练设置,请执行以下操作:
-
按照这些说明接入车辆并打开设备控制台。
-
从主导航窗格中选择 Calibration (校准)。
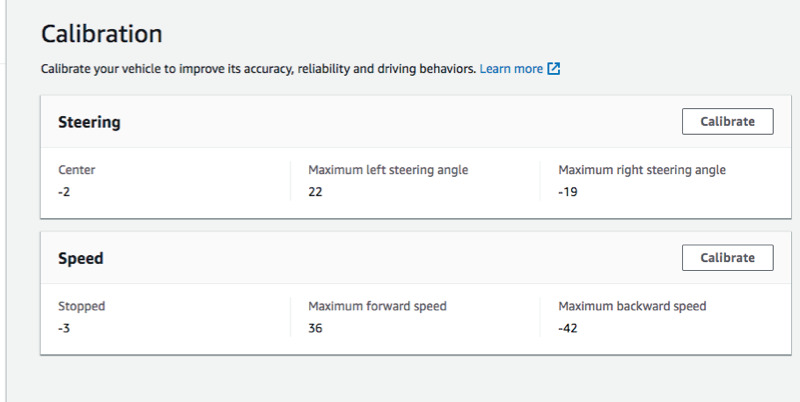
-
在校准页面上,在转向中选择校准,然后按照以下步骤校准车辆的最大转向角度。
-
将车辆放在地面或其他硬质表面上,在转向校准期间您应该可以看到车轮。选择下一步。
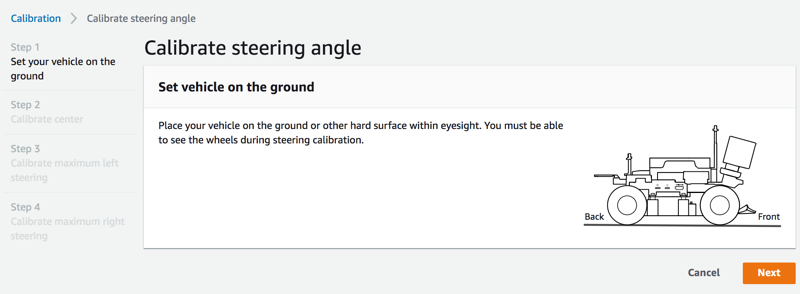
在赛道上操作车辆转向,所需的转向角度要远小于在空气中转向车轮。要测量车辆的实际转向角度,必须要将车辆放在赛道表面上。
-
在 Center steering (中心转向) 下,逐步移动滑块或者按左右箭头,使其到达至少一个前轮与同侧的后轮对齐的位置。选择下一步。

AWS DeepRacer 使用 Ac kermann 前轮转向系统
在转弯的内侧和外侧转动车轮。这意味着左右前轮通常会转动不同的角度。在 AWS 中 DeepRacer,校准是在中心值上进行的。因此,您需要在所选一侧调整车轮在直线上对齐。 注意
确保正确校准您的 AWS DeepRacer 车辆,使其能够尽可能保持中心转向。您可以手动推动车辆,验证车辆跑直线来进行测试。
-
在设备控制台上的 Maximum left steering (最大左转) 下,逐渐将滑块移动到左侧或者按左箭头,直到车辆前轮停止向左转。噪音应该很小。如果您听到较大的噪音,则可能调节过度了。该位置对应于最大左转角度。如果您的模拟操作空间中的转向角度有限,请在此处匹配对应的值。选择下一步。

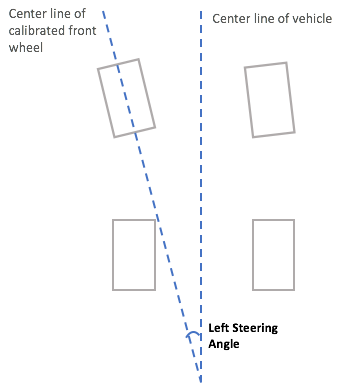
要测量实际最大左转角度,请为车辆画一条中心线,标记用于校准的所选前轮的两个边缘点,然后为此前轮画一条中心线,直至穿过车辆的中心线。使用量角器来测量角度。请参阅下图。如果您希望匹配训练中的实际角度,则可以在接下来的训练作业中,为操作空间设置相同值。
-
在 Maximum right steering (最大右转向) 下,逐渐将滑块移动到右侧,直到所选前轮停止向右转。噪音应该很小。如果您听到较大的噪音,则可能调节过度了。该位置对应于最大右转角度。如果您的模拟操作空间中的转向角度有限,请在此处匹配对应的值。选择完成。
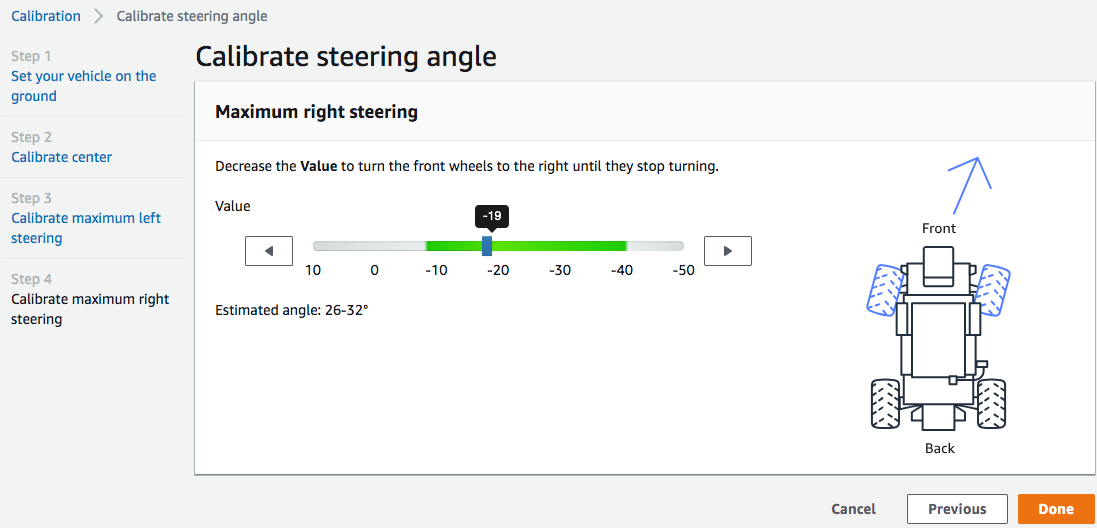
要测量实际最大右转角度,请按照类似于测量最大左转角度所用的步骤来操作。
您的 AWS DeepRacer 车辆的转向校准到此结束。
-
-
要校准车辆的最高速度,在校准页面上,在速度中选择校准,然后按照以下步骤操作。
-
抬起车辆,以便车轮可以自由转动。在设备控制台上选择 Next (下一步)。
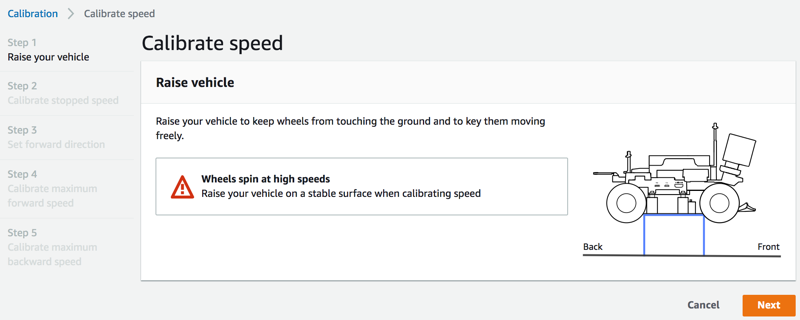
注意
如果车辆的速度设置过高,则在校准过程中可能会跑得太快,对环境、车辆或附近的其他人造成伤害。您应抬起车辆,如此处所示,但不要拿在手上。
-
要校准停止的速度,请按下向左或向右箭头逐渐更改设备控制台上停止速度下的停止值,直到车轮停止转动。选择下一步。
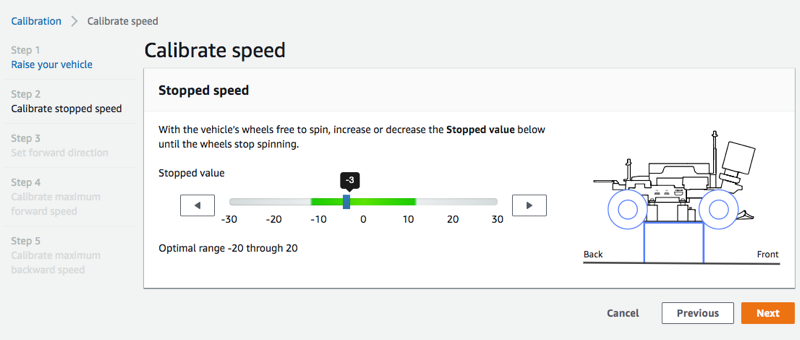
注意
在进一步向左或向右按 Stopped value (停止值) 直至您听到噪音时,车轮将要开始转动。理想的零油门点位于两个值的中间。例如,如果您开始在左侧的 16、在右侧的 -4 开始听到噪音,则最佳停止值应为 10。
-
要设置车辆的前进方向,请将车辆如屏幕及此处图像所示放置,然后按左右箭头来使车轮转动。如果车轮顺时针转动,则设置了前进方向。如果没有,请切换 Reverse direction (反向方向)。选择下一步。

注意
在 re AWS : Invent 2018 上分发的车辆可能会将前进方向设置为反向。在这种情况下,请确保切换 Reverse direction (反向方向)。
-
要校准最大前进速度,请在 Maximum forward speed (最大前进速度) 下,缓慢向左或向右移动滑块以缓慢调整 Maximum forward speed value (最大前进速度值) 数值为一个正值,使得 Estimated speed (估计速度) 值等于或接近在模拟中指定的最大速度。选择下一步。

注意
您的车辆可以达到的实际最大速度取决于赛道表面的摩擦力,以及车辆电池电量。为了灵活起见,您可以将车辆的速度限制设置为比在模拟中为训练指定的最大速度高 20% 到 30%。一般而言,您设置的最大速度值应位于绿色区域。如果超过该数值,车辆可能会驾驶速度太快,导致中断的风险增加。此外,训练的操作空间不支持超过 2 米/秒的最大速度。
-
要校准最大后退速度,请在 Maximum forward speed (最大后退速度) 下,缓慢向左或向右移动滑块以缓慢调整 Maximum forward speed value (最大后退速度值) 数值为一个负值,使得 Estimated speed (估计速度) 值等于或接近在模拟中指定的最大速度。选择完成。

注意
AWS DeepRacer 车辆在自动驾驶模式下不使用后退速度。您可将后退速度设置为能够舒适地控制车辆手动驾驶模式的任意值。
校准 AWS DeepRacer 车辆的最大速度到此结束。
-
