本文為英文版的機器翻譯版本,如內容有任何歧義或不一致之處,概以英文版為準。
校正您的 AWS DeepRacer 車輛
為了獲得最佳效能,您必須校正 AWS DeepRacer 車輛的某些實體部分。如果使用未經校正的車輛,它會增加測試模型時的不確定性。如果車輛的效能不是最佳,您可能會忍不住只調整深度學習模型的程式碼。但如果根本原因源自機械,您將無法改善車輛效能。透過校正調整機械。
若要校正 AWS DeepRacer 車輛,請分別設定車輛電子控制系統 (ECS) 及其伺服機制 (servo) 的任務週期
最大速度和轉向角度會定義動作空間的範圍。您可以在模擬的訓練期間,指定最大速度和最大轉向角度。將訓練模型部署至 AWS DeepRacer 車輛以在真實世界賽道上行駛時,必須校準車輛的最高速度和轉向角度,以符合模擬訓練中使用的角度。
為確保真實世界的體驗符合模擬的體驗,您應該校正車輛,使符合模擬和真實世界間的最大速度和最大轉向角度。一般而言,有兩種方法可執行此校正:
-
定義訓練的動作空間並校正實體車輛,使符合設定。
-
測量車輛的實際效能以及變更模擬的動作空間設定。
強大的模型可以處理模擬和真實世界之間的某些差異。不過,兩種方法您都應該重複試驗,以找出最佳結果。
開始校正之前,請先開啟運算模組。在啟動且電源 LED 亮起穩定的藍色時,開啟車輛的電池。聽到兩短一長的嗶聲後,即準備好進行校正。
若要校正您的 AWS DeepRacer 車輛以符合訓練設定:
-
按照這些說明存取您的車輛,並開啟裝置控制主控台。
-
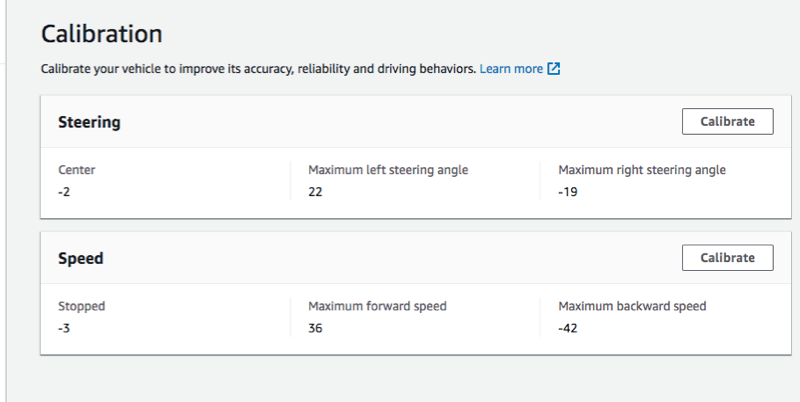
從主要導覽窗格選擇 Calibration (校正)。
-
在校正頁面上,選擇在轉向中校正,然後遵循下列步驟來校正車輛的最大轉向角度。
-
將車輛放在地面或其他堅硬的表面,以在校正轉向時查看輪子。選擇 Next (下一步)。
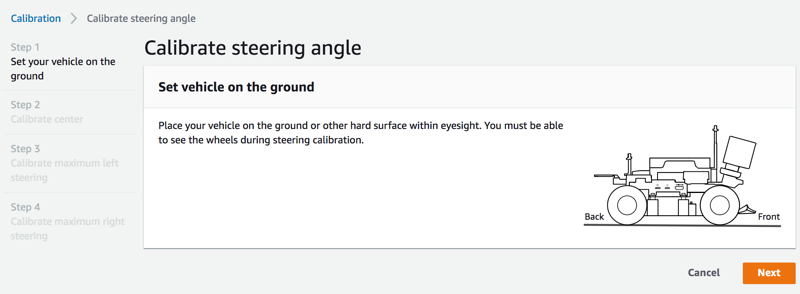
讓賽道上的車輛轉向所需要的角度,比讓輪子在空中轉向還小。若要測量輪子的實際轉向角度,請務必須將車輛放在賽道表面。
-
在 Center steering (中心轉向) 下,逐漸移動滑桿或按下方向的向左、向右箭頭,至少讓一個前輪對齊同側的後輪。選擇 Next (下一步)。
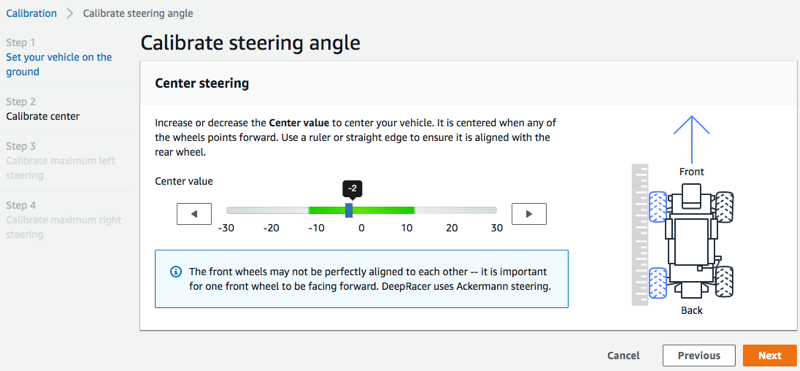
AWS DeepRacer 使用 Ackermann 前輪轉向
,在轉彎的內部和外部轉動車輪。這表示左前輪和右前輪通常會轉向不同的角度。在 AWS DeepRacer 中,對中心值進行校正。因此,您需要調整所選側的輪子,才能對齊直線。 注意
請務必妥善校正您的 AWS DeepRacer 車輛,以便盡可能保持中心轉向。您可以手動推動車輛來測試此項目,驗證它能否走直線。
-
在 Maximum left steering (最大左轉) 下,將滑桿逐漸向左移動,或按下向左鍵,直到車輛前車輪停止左轉。會有一點點噪音。如果您聽到很吵的噪音,表示太過了。對應到最大左轉角度的位置。如已在模擬動作空間中限制了轉向角度,請符合此處的對應值。選擇 Next (下一步)。
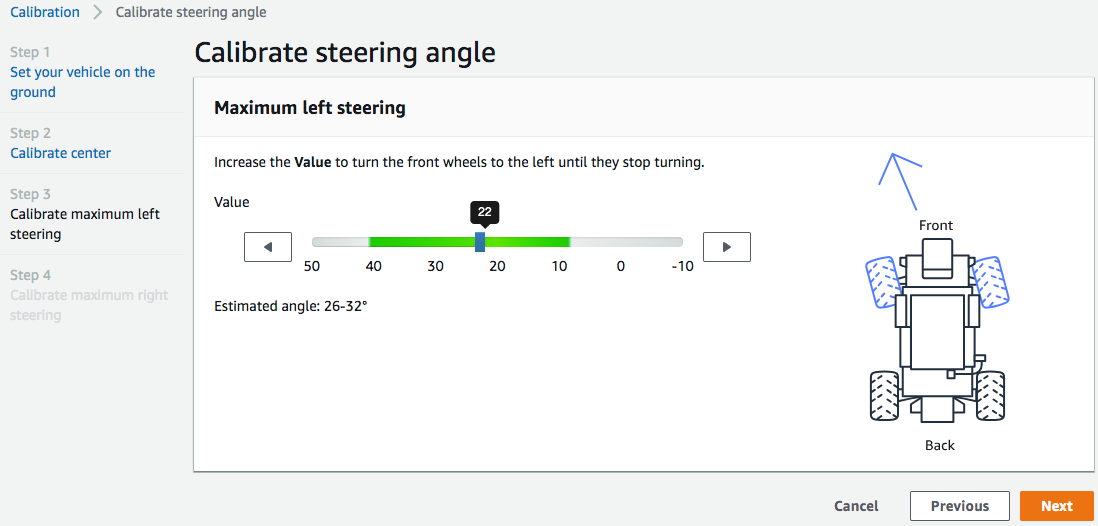
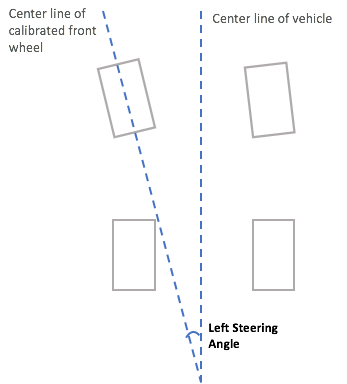
若要測量實際的左轉最大轉向角度,請繪製車輛的中心線,標記所選前輪兩邊緣的點以供校正,然後移動此前輪的中心線,直到它超過車輛的中心線為止。使用量角器測量角度。請參閱下圖。如果希望符合訓練的實際角度,您可以在下個訓練任務的動作容間中設定相同的值。
-
在 Maximum right steering (最大右轉) 下,將滑桿逐漸向右移動,直到所選前輪子停止右轉。會有一點點噪音。如果您聽到很吵的噪音,表示太過了。對應至最大右轉角度的位置。如已在模擬動作空間中限制了轉向角度,請符合此處的對應值。選擇完成。
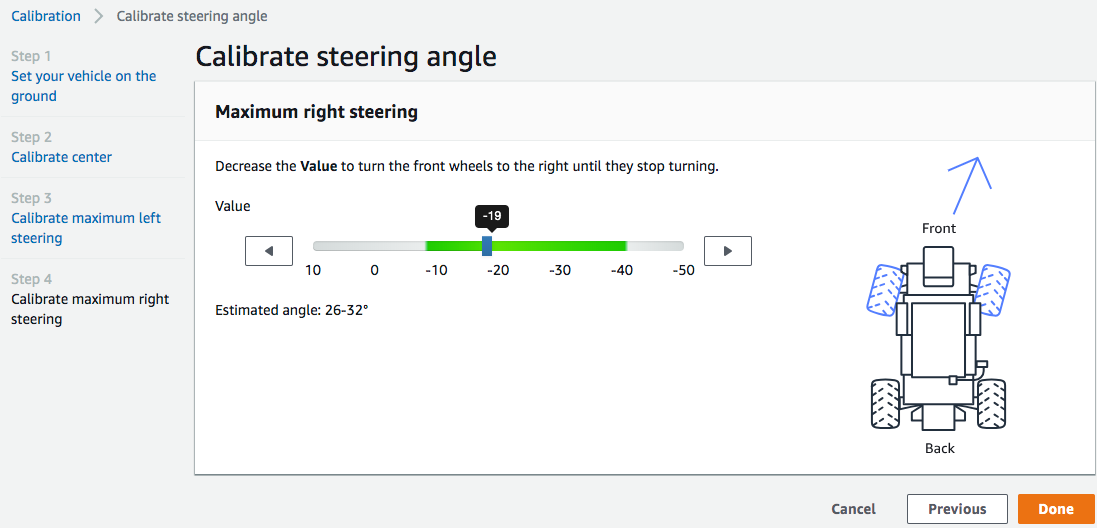
若要測量實際的最大右轉角度,請依照類似測量最大左轉角度所用的步驟執行作業。
您的 AWS DeepRacer 車輛轉向校準到此結束。
-
-
若要校正車輛的最高速度,請在校正頁面上選擇在速度中校正,然後遵循下列步驟。
-
抬起車輛,讓車輪可以自由轉動。在裝置控制主控台上選擇 Next (下一步)。
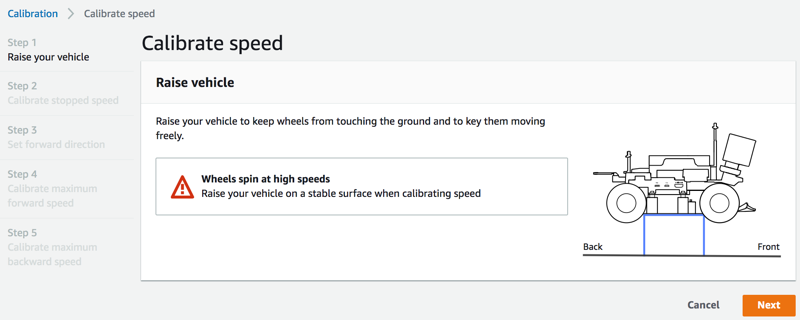
注意
如果車輛的速度設得太高,它在校正時可能會跑太快,造成環境、車輛或附近其他人的傷害。您應該依此處的說明舉起車輛,但不是抓在手中。
-
若要校正停止的速度,請按向左或向右箭頭,在裝置主控台的停止速度下逐漸變更停止值,直到輪子停止轉動為止。選擇 Next (下一步)。
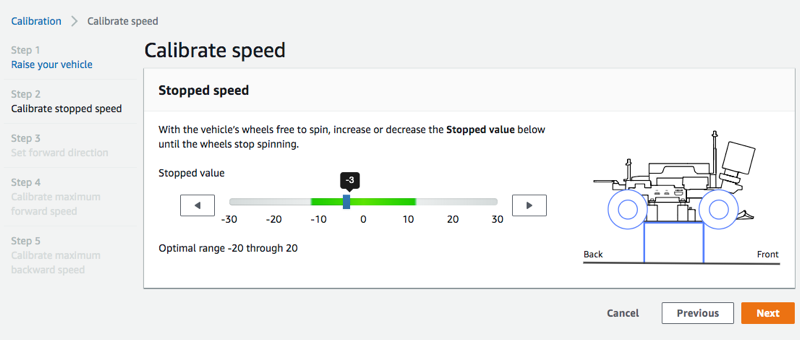
注意
當您開始聽到雜音時,進一步向左或向右按下 Stopped value (停止的值),車輪即將移動。理想的零調節點是兩個值的中間值。例如,如果您在左 16、右 -4 的位置開始聽到雜音,最佳的停止值應為 10。
-
若要設定車輛的前進方向,請如畫面及圖所示放置車輛,然後按向左鍵或向右鍵,讓車輪轉動。如果車輪順時針轉動,即設定前進方向。如果沒有,請切換 Reverse direction (反向)。選擇 Next (下一步)。
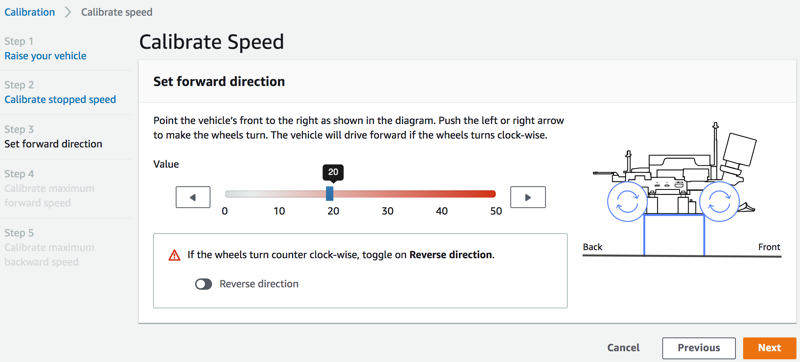
注意
在 AWS re:Invent 2018 上分佈的車輛,其向前方向可能設定為反向。在這種情況下,請務必切換 Reverse direction (反向)。
-
若要校正最大前進速度,請在 Maximum forward speed (最大前進速度) 下,輕輕向左或向右移動滑桿,逐漸將 Maximum forward speed value (最大前進速度值) 數字調整成這樣的正值:Estimated speed (預估速度) 值等於或類似模擬中指定的最大速度。選擇 Next (下一步)。
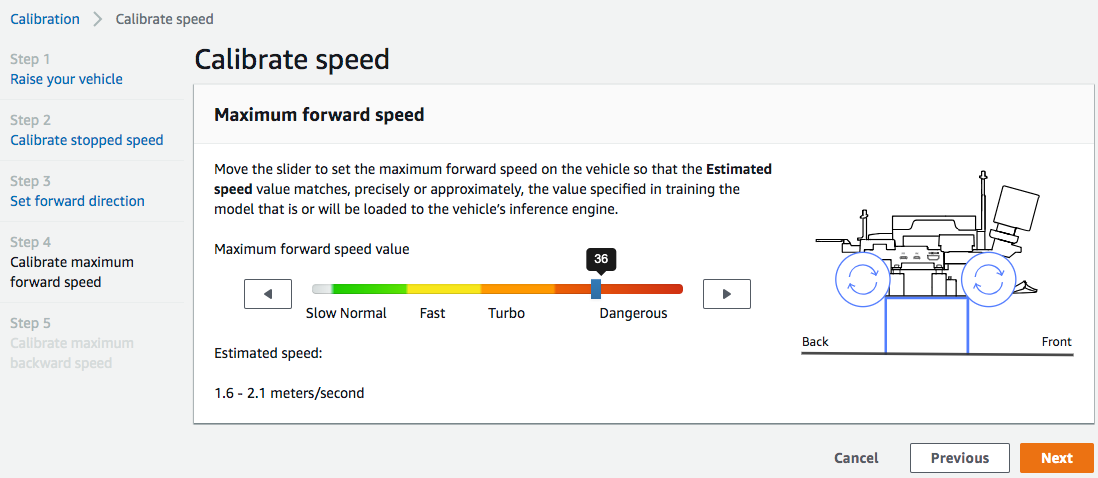
注意
您車輛的實際最大速度取決於賽道表面的摩擦和車輛電池等級。為了讓它有彈性,您可以將車輛的調節限制設定為比模擬訓練中指定的最大速度高百分之 20 到 30。一般而言,您應該將最大速度值設定在綠色區域內。高出此區域,您的車輛可能跑得太快,毀損的風險提高。此外,訓練的動作空間不支援超過 2 m/s 的最大速度。
-
若要校正最大倒退速度,請在 Maximum backward speed (最大倒退速度) 下,輕輕向左或向右移動滑桿,逐漸將 Maximum backward speed value (最大倒退速度值) 數字調整成這樣方負值:Estimated speed (預估速度) 值等於或類似模擬中指定的最大速度。選擇完成。
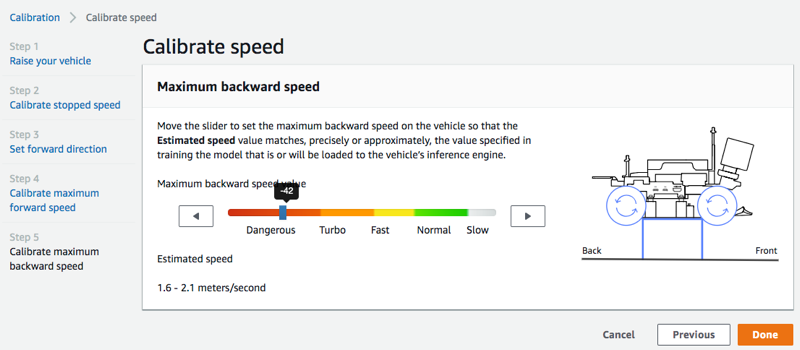
注意
AWS DeepRacer 車輛不會在自動駕駛模式下使用向後速度。您可以將倒退速度設成您可以輕鬆控制車輛手動駕駛模式的任何值。
如此即會完成校準 AWS DeepRacer 車輛的最高速度。
-
