本文為英文版的機器翻譯版本,如內容有任何歧義或不一致之處,概以英文版為準。
AWS DeepRacer 軌道設計範本
下列DeepRacer軌道設計範本顯示您可以按照本節提供的指示建立的 AWS 軌跡。
注意
此部分還提供了可用預先打印的曲目的模板。與使用自己的材料構建軌道相比,組裝預先打印的軌道需要更少的時間,並且是一個簡單的過程。我們建議使用預先打印的軌道和障礙物。若要購買預先列印的曲目,請參閱 AWS DeepRacer 店面
對於所有音軌,要重現相同的色彩製作,請使用以下規格:
綠色:PMS 3395C
橙色:PMS 137C
黑色:PMS 432C
白色:CMYK 0-0-2-9
這些軌道在其表面使用以下材料進行了測試:
塑膠
這些軌道印在 13 盎司的塗料乙烯基上,並具有啞光效果,以減少眩光。塑膠比地毯便宜,提供良好的效能。塑膠不像地毯那麼耐用。
地毯
這些軌道印刷在 8 盎司的染料昇華聚酯面地毯上,並配有乳膠橡膠背襯。地毯耐用,並提供了出色的性能,但價格昂貴。
由於其尺寸較大,因此無法輕鬆將軌道打印在單件材料上。拼接各片段時請務必對齊賽道線。
主題
AWS DeepRacer A 到 Z 賽道 (基本) 賽道範本
AWS DeepRacer A 到 Z 賽道 (基本) 賽道是 AWS DeepRacer 史上最受歡迎的體能競賽賽道。它最初在 AWS re: Invenent 2018 上發行,佔用空間在所有 AWS DeepRacer 實體競賽軌道中最小。可在 AWS DeepRacer 店面
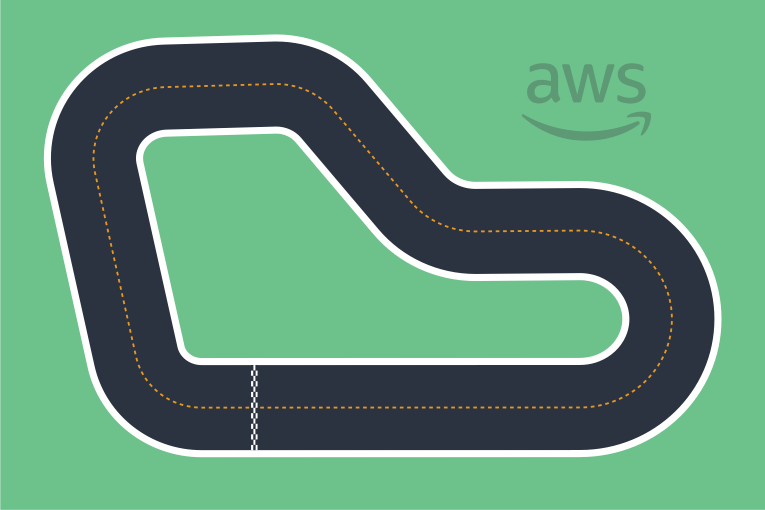
我們建議初學者賽事和初次賽車手使用此賽道。憑藉各種跑步和直線運動,它為首次和經驗豐富的賽車手提供了一個引人注目的挑戰。AWS DeepRacer A 到 Z 賽道 (基本) 軌道是一對一實體複製主控台中可用的虛擬軌道。它為賽車手提供在虛擬環境中訓練模型的機會,然後將模型部署到實體 AWS DeepRacer 裝置,以便在實體賽道上進行自主競賽。
若要列印或建立自己的 A 到 Z 賽道 (基本) 賽道,請下載此 AWS DeepRacer A 到 Z 賽道 (基本) 檔案。
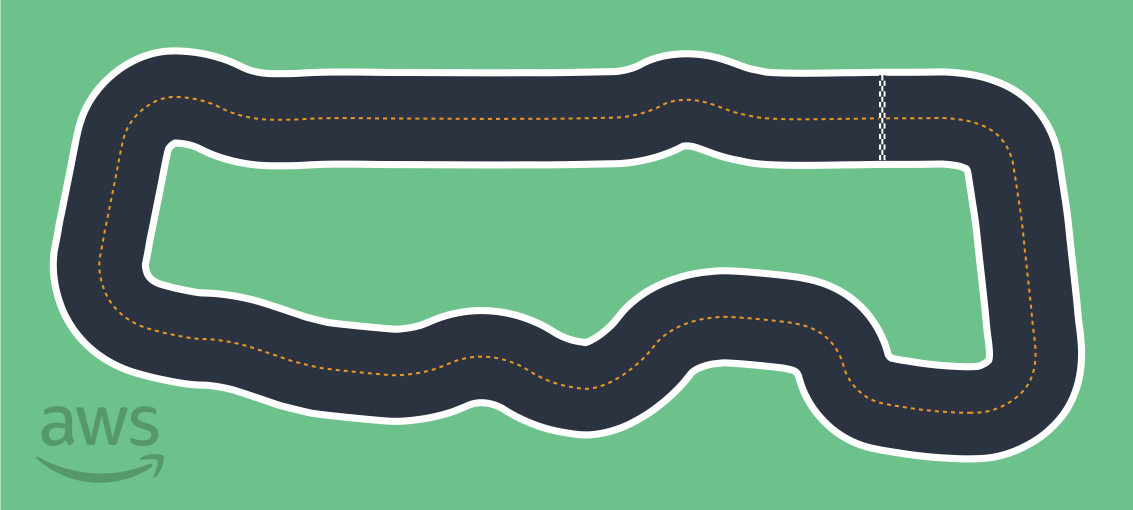
AWS DeepRacer 微笑高速公路 (中級) 賽道範本
AWS DeepRacer 微笑賽道最初以 AWS DeepRacer 冠軍賽 2019 年賽道的形式發行。可在 AWS DeepRacer 店面

對於有經驗豐富的賽車手和更大物理空間的賽事,我們建議使用此中間賽道 這是對控制台中可用虛擬軌道的 1:1 實體複製。它為賽車手提供在虛擬環境中訓練模型的機會,然後將模型部署到實體 AWS DeepRacer 裝置,以便在實體賽道上進行自主競賽。
若要列印或建立您自己的 AWS S DeepRacer mile 賽道 (中級) 賽道,請下載此 AWS S DeepRacer mile 賽道 (中級) 軌道檔案。
AWS DeepRacer RL 賽道 (進階) 賽道範本
AWS DeepRacer RL 高速公路 (進階) 賽道 (又稱 AWS 高DeepRacer峰會賽道) 最初於 2022 年在 AWS 高DeepRacer峰會中發行,是 AWS 歷史上最長的實體賽道。DeepRacer可在 AWS DeepRacer 店面
我們建議使用 AWS DeepRacer RL 賽道 (進階) 賽道,以應付有經驗豐富的賽車手的賽事。它提供了一個引人注目的挑戰誰喜歡快速走在直道上的賽車手. AWS DeepRacer RL 賽道 (進階) 軌道是一對一實體複製主控台中可用的虛擬軌道。它為賽車手提供了在虛擬環境中訓練模型的機會,然後將模型部署到實體 AWS DeepRacer 裝置,以便在物理賽道上進行自主競賽。
若要列印或建立您自己的 AWS RL 賽道 (進階) 賽道,請下載此 AWS DeepRacer RL 賽道 (進階) 軌道檔案。
AWS DeepRacer 單回合軌道範本
此基本賽道範本包含由一個彎道區段連接的兩個直道區段。使用此軌道訓練的模型應使 AWS DeepRacer 車輛直線行駛,或向單個方向轉彎。
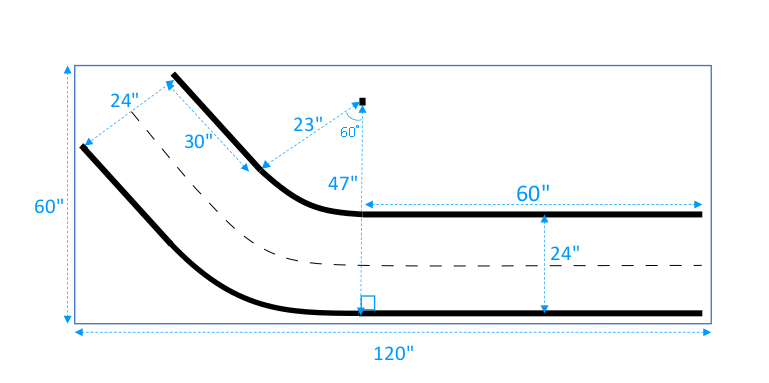
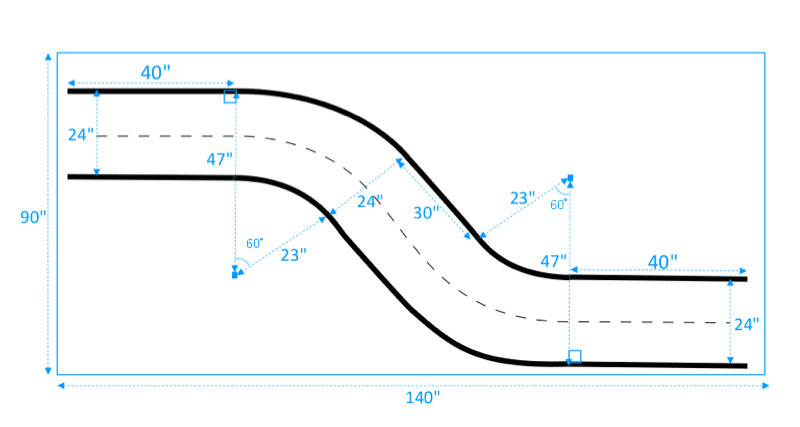
AWS DeepRacer S 曲線軌道範本
此賽道比只有一個彎道的賽道更複雜,因為模型需要學習兩個方向的轉彎。您可以在第一個轉彎後轉向反方向,輕鬆將只有一個彎道的賽道建構說明,延長為這條賽道。
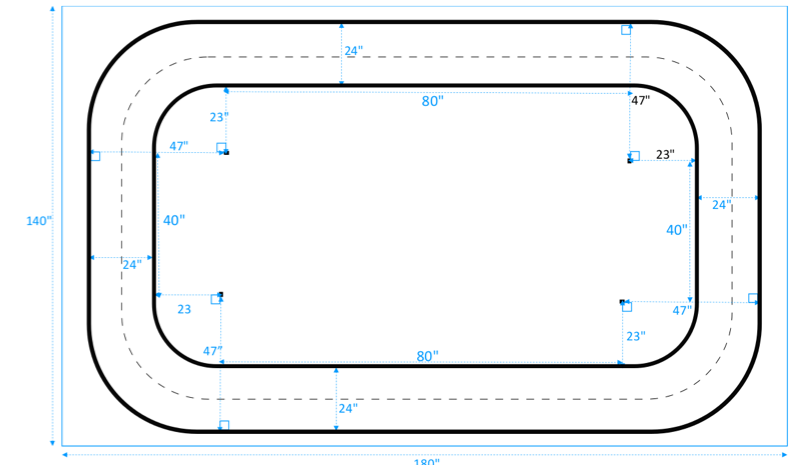
AWS DeepRacer 迴圈追蹤範本
這條一般的環形賽道是只有一個彎道的 90 度重複賽道。它需要一個更大的封閉區域來鋪設整個軌道。