기계 번역으로 제공되는 번역입니다. 제공된 번역과 원본 영어의 내용이 상충하는 경우에는 영어 버전이 우선합니다.
레이스를 사용자 지정하십시오.
그룹에 맞는 레이스를 만들려면 레이스 세부 정보 페이지에서 레이스 사용자 지정을 확장하십시오. 타임 트라이얼 레이스 설정은 장애물 회피 및 헤드-투-봇 레이스에도 적용되지만, 장애물 회피 및 헤드-투-봇 레이스 유형에는 이벤트 목표에 맞게 특별히 조정된 레이스 환경을 만들 수 있는 추가 설정이 있습니다.
레이스를 사용자 지정하려면
-
AWS DeepRacer 콘솔
을 엽니다. -
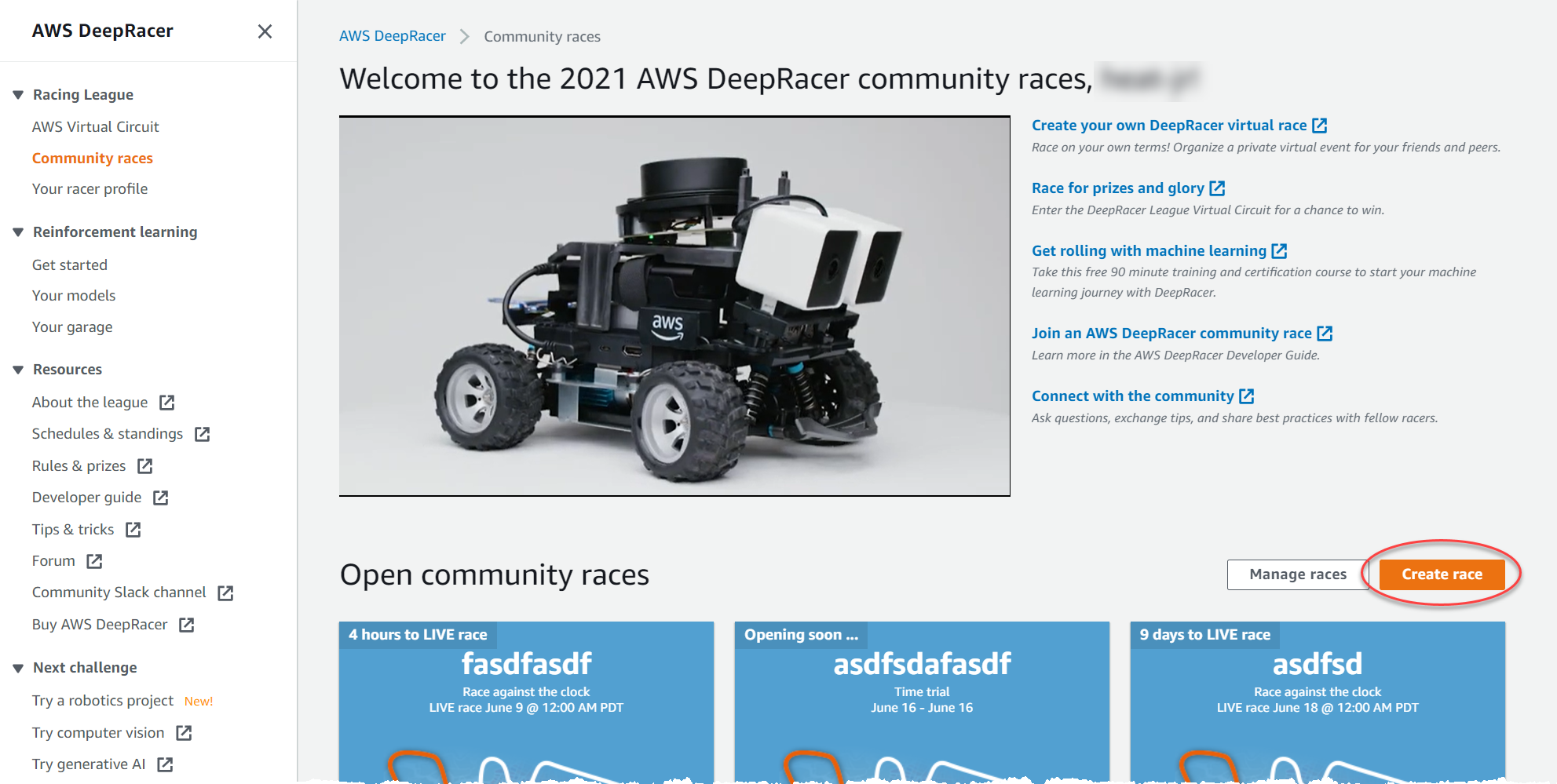
커뮤니티 레이스를 선택합니다.
-
커뮤니티 레이스 페이지에서 레이스 만들기를 선택합니다.
-
레이스 세부 정보 페이지에서 경쟁 형식을 선택합니다. 즉, 설정한 시간 내에 자신의 일정에 따라 참가할 수 있는 클래식 레이스또는 실시간 이벤트로 비공개 또는 공개로 방송할 수 있는 라이브 레이스를 선택할 수 있습니다.
-
선택한 대회 형식에 따라 클래식 레이스를 계속생성하려면 또는 가상 커뮤니티 레이스 만들기: 빠른 시작 안내서 에서 라이브 레이스를 계속 만들려면의 1~3단계를 따르십시오.
-
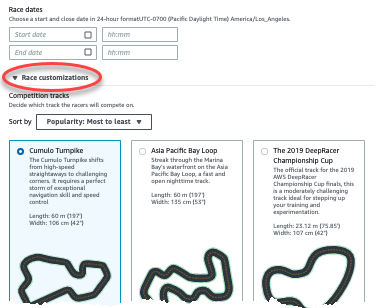
레이스 날짜를 선택한 후 레이스 사용자 지정을 확장하십시오.
-
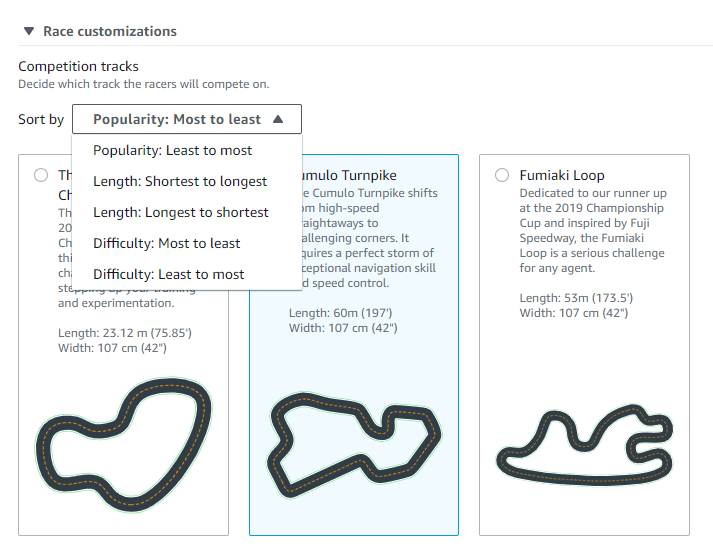
경쟁 트랙을 선택합니다. 인기도: 가장 높은 것부터 낮은 것/가장 낮은 것부터 가장 높은 것, 난이도: 가장 높은 것부터 낮은 것/가장 낮은 것부터 가장 높은 것, 길이: 가장 긴 것부터 가장 짧은 것/가장 짧은 것부터 가장 긴 것 순으로 트랙을 정렬할 수 있습니다. 각 카테고리의 모든 트랙을 보려면 더 많은 레이스 트랙 옵션 보기를 선택하십시오. 확장된 메뉴를 닫으려면 더 적은 레이스 트랙 옵션 보기를 선택합니다.
-
참가자를 위해 이벤트의 목표와 규칙을 요약한 레이스에 대한 설명을 작성할 수도 있습니다. 라이브 레이스의 경우 이벤트의 화상 회의 또는 라이브 스트림을 위한 링크를 추가하십시오. 설명은 리더보드 세부 정보에 표시됩니다.
-
클래식 레이스의 랭킹 방식은 가장 빠른 랩을 기록한 레이서가 우승하는 베스트 랩 타임, 이벤트 기간 내에 여러 번 시도한 결과 평균시간이 가장 좋은 레이서가 우승하는 평균 시간, 전체 평균 시간이 가장 빠른 레이서가 우승하는 총 시간 중에서 선택하십시오. 모든 라이브 레이스의 리더보드 순위는 최고 랩 시간을 기준으로 순위가 매겨지므로 이 필드는 표시되지 않습니다.
-
클래식 레이스의 경우 최소 랩 값을 선택하십시오. 최소 랩 수는 레이서가 레이스의 리더보드에 결과를 제출할 자격을 갖추기 위해 완료해야 하는 연속 랩 수입니다. 초보자 레이스의 경우 작은 숫자를 선택합니다. 고급 사용자의 경우 더 큰 숫자를 선택합니다. 기본값은 랩 한 바퀴이므로 라이브 레이스에서는 이 사용자 지정을 사용할 수 없습니다.
-
오프 트랙 페널티의 경우 RL 모델이 트랙을 벗어날 때 레이서의 시간에 추가할 시간을 초 단위로 선택합니다.
-
이제 타임 트라이얼 레이스의 모든 사용자 지정 옵션을 완료했습니다. 타임 트라이얼 레이스 형식을 선택한 경우 다음을 선택하여 레이스 세부 정보를 검토하십시오. 장애물 회피 또는 헤드-투-봇 레이스 형식을 선택한 경우 적절한 절차로 건너뛰어 레이스 사용자 지정을 완료하십시오.
-
레이스 세부 정보 검토 페이지에서 레이스 사양을 검토합니다. 변경하려면 편집 또는 이전을 선택하여 레이스 세부 정보 페이지로 돌아가십시오. 초대 링크를 받을 준비가 되면 제출을 선택합니다.
-
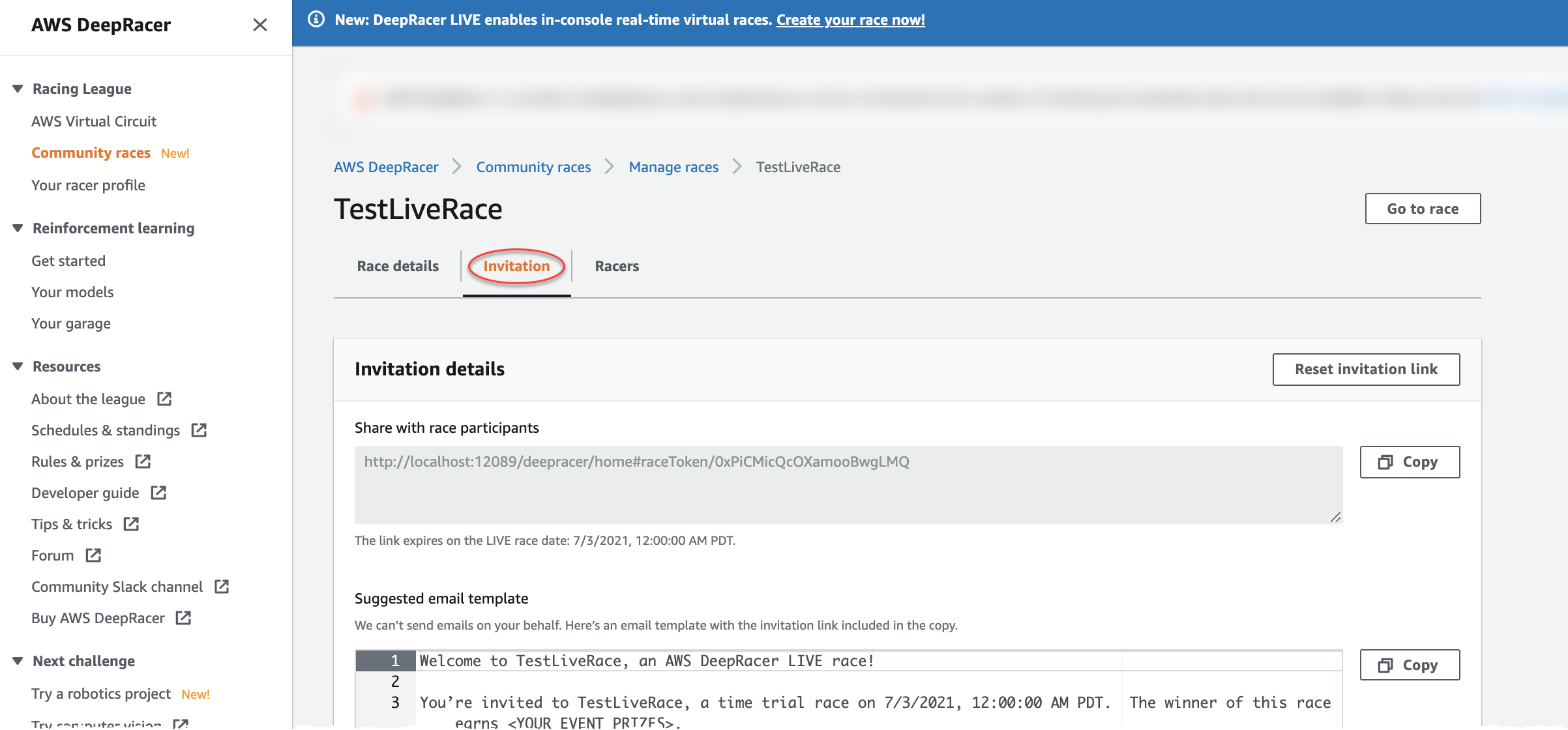
레이스를 공유하려면 모달의 초대 링크를 클립보드에 복사하기를 선택하고 이메일, 문자 메시지, 즐겨 사용하는 소셜 미디어 애플리케이션에 붙여넣으십시오. 초대 탭을 선택하여 <Your Race Name> 페이지에서 레이스를 공유할 수도 있습니다. 링크는 레이스 마감일에 만료됩니다.
-
완료 를 선택합니다. 레이스 관리 페이지가 표시됩니다.
이메일 템플릿을 사용하여 새 레이서를 초대하고, 레이스에서 레이서를 삭제하고, 레이스의 모델 제출 상태 등을 확인하는 방법을 알아보려면 커뮤니티 레이스 관리를 참조합니다.
장애물 회피 레이스 사용자 지정을 마치려면
-
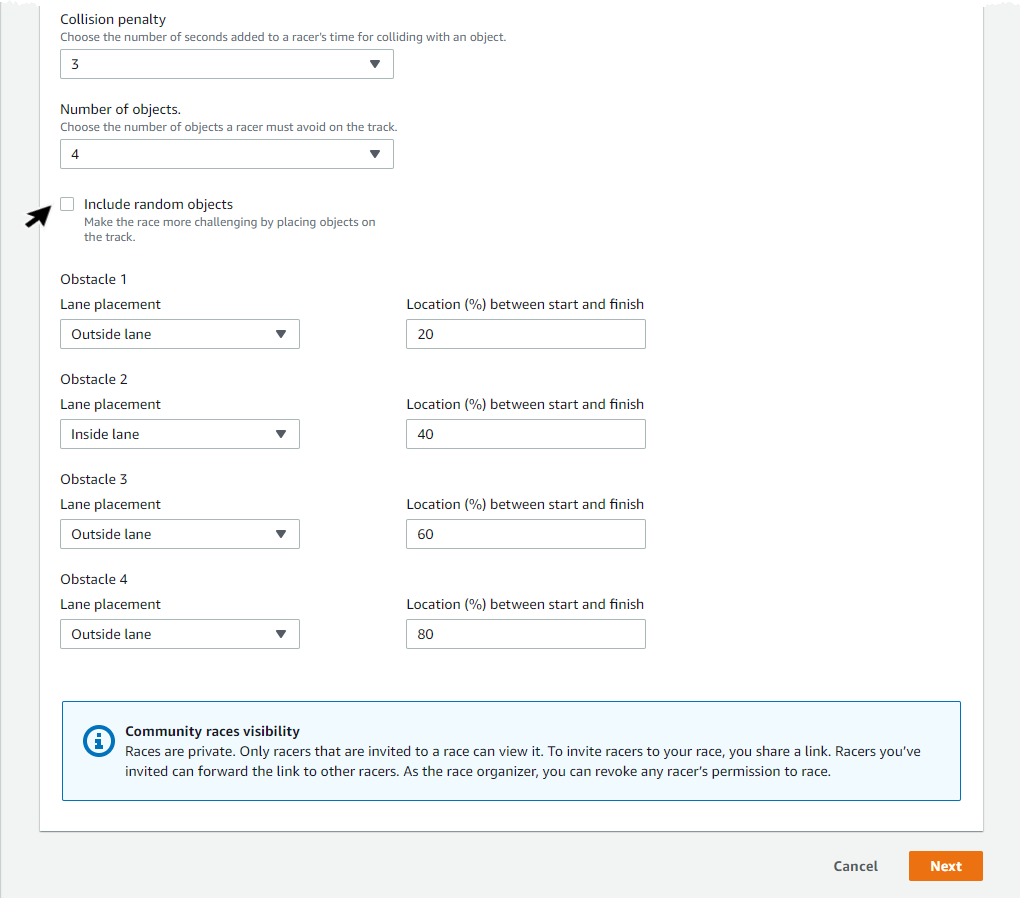
충돌 페널티에서 레이서가 물체 또는 봇과 충돌하는 데 걸리는 시간에 추가되는 시간(초)을 선택하십시오. 몇 초가 추가될수록 도전 과제는 더 커집니다.
-
장애물 수에서는 레이서가 트랙에서 피해야 하는 장애물의 갯수를 선택합니다. 장애물이 많을수록 레이스가 더 어려워집니다.
-
레이서마다 다른 위치에 배치될 무작위 장애물을 레이스 트랙에 추가하려면 무작위 장애물 포함을 선택합니다. 레이스 트랙에서 예상치 못한 장애물과 같은 무작위 이벤트에 잘 일반화하는 RL 모델을 만들려면 더 오랜 시간 동안 훈련하고 보상 함수 시행착오를 겪어야 하기 때문에 참가자에게는 더 어려운 과제입니다.
-
차선 배치에 사용할 차선 번호 또는 장애물 위치를 선택하여 각 장애물을 배치할 위치를 선택하십시오. 트랙은 중앙선에서 반으로 나뉘어 안쪽 및 바깥쪽 차선을 만듭니다. 안쪽 차선 또는 바깥쪽 차선에 장애물을 배치할 수 있습니다.

-
각 장애물에 대해 시작과 종료 사이의 위치(%) 값을 선택합니다. 숫자는 장애물을 놓으려는 트랙의 시작선과 끝선 사이의 위치(백분율로 표시됨) 를 나타냅니다.
-
이제 장애물 회피 레이스를 위한 고유한 사용자 지정 옵션을 모두 완료했습니다. 다음을 선택합니다.
-
레이스 세부 정보 검토 페이지에서 레이스 사양을 검토합니다. 변경하려면 편집 또는 이전을 선택하여 레이스 세부 정보 페이지로 돌아가십시오. 초대 링크를 받을 준비가 되면 제출을 선택합니다.
-
레이스를 공유하려면 초대 링크 복사를 선택하고 이메일, 문자 메시지 및 즐겨 사용하는 소셜 미디어 애플리케이션에 붙여넣으십시오. 모든 레이스는 비공개로 진행되며 초대 링크를 받은 레이서만 관람할 수 있습니다. 링크는 레이스 마감일에 만료됩니다.
-
완료 를 선택합니다. 레이스 관리 페이지가 표시됩니다.
레이스로 무엇을 할 수 있는지 알아보려면 커뮤니티 레이스 관리를 참조하십시오.
헤드-투-봇 레이스 사용자 지정을 마치려면
-
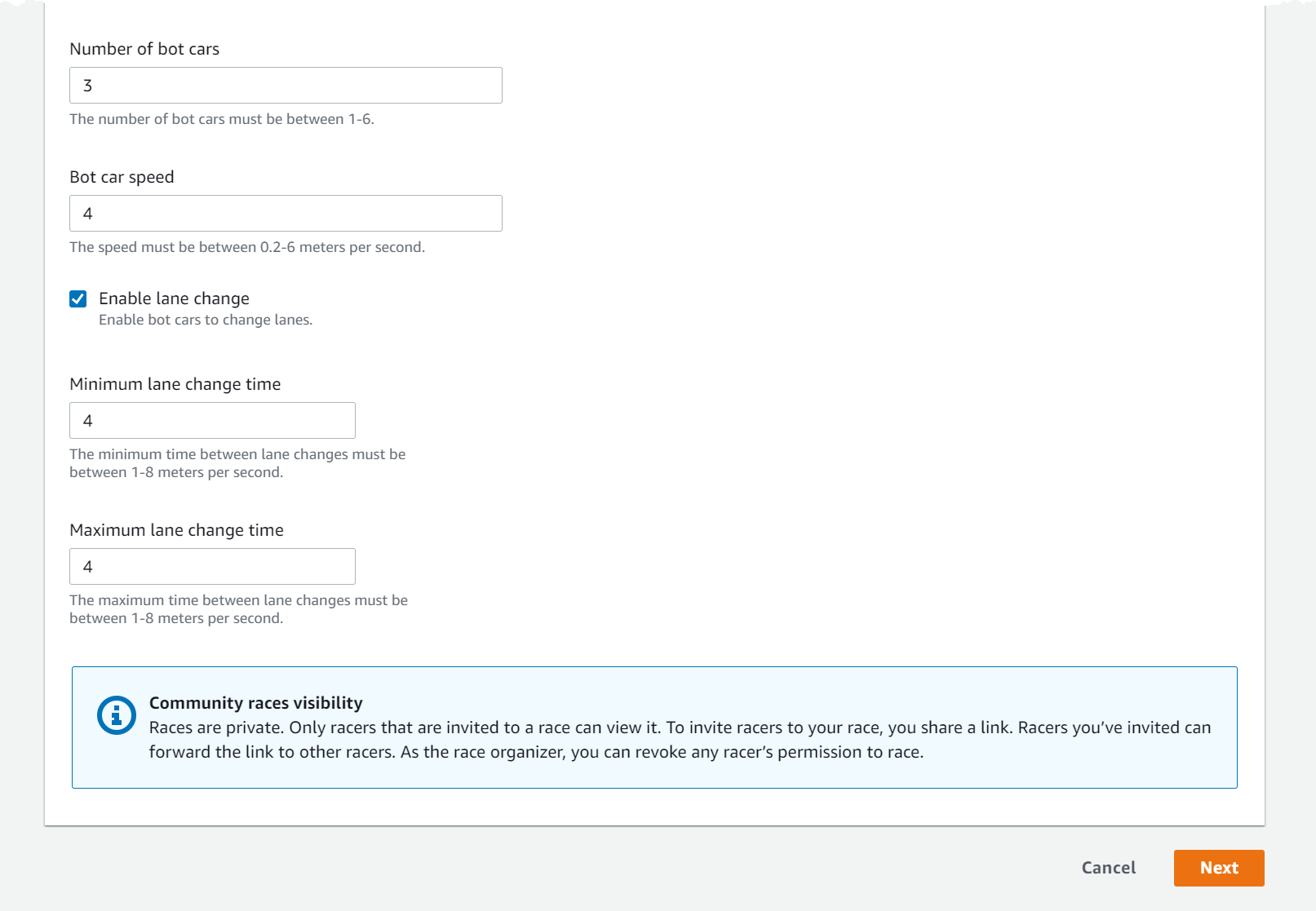
봇 자동차 수에서 참가자의 AWS DeepRacer RL 모델을 상대로 경주할 자동차 수를 선택합니다. 봇 자동차는 비디오 게임 AI 차량과 비슷합니다. 무작위로 움직이는 물체이기 때문에 고정된 물체보다 복잡성이 한 단계 더 높습니다. 트랙에 봇이 많을수록 레이스가 어려워집니다. 최대 6개까지 선택할 수 있습니다.
-
봇 자동차 속도의 경우 봇 자동차가 트랙에서 얼마나 빨리 움직일지 선택하십시오. 속도는 초당 미터 단위로 측정됩니다. 속도는 초당 0.2~6미터여야 합니다.
-
봇이 차선을 변경하도록 허용하여 레이서의 AWS DeepRacer RL 모델의 챌린지가 더욱 복잡해지도록 하려면 차선 변경 활성화를 선택하십시오.
-
최소 차선 변경 시간에서 봇 차량이 차선을 변경하는 인스턴스 사이에 걸리는 최대 시간(초)을 선택합니다.
-
최대 차선 변경 시간에서 봇 차량이 차선을 변경하는 인스턴스 사이에 걸리는 최대 시간(초)을 선택합니다.
-
이제 헤드-투-봇 레이스를 위한 고유한 사용자 지정 옵션을 모두 완료했습니다. Next(다음)를 선택합니다.
-
레이스 세부 정보 검토 페이지에서 레이스 사양을 검토합니다. 변경하려면 편집 또는 이전을 선택하여 레이스 세부 정보 페이지로 돌아가십시오. 초대 링크를 받을 준비가 되면 제출을 선택합니다.
-
레이스를 공유하려면 초대 링크 복사를 선택하고 이메일, 문자 메시지 및 즐겨 사용하는 소셜 미디어 애플리케이션에 붙여넣으십시오. 모든 레이스는 비공개로 진행되며 초대 링크를 받은 레이서만 관람할 수 있습니다. 링크는 레이스 마감일에 만료됩니다.
-
완료 를 선택합니다. 레이스 관리 페이지가 표시됩니다.
레이스를 편집하고 지우는 방법에 대해 알아보려면 커뮤니티 레이스 관리를 참조하십시오.
