翻訳は機械翻訳により提供されています。提供された翻訳内容と英語版の間で齟齬、不一致または矛盾がある場合、英語版が優先します。
3D-2D オブジェクト追跡ラベル付けジョブのワーカータスクインターフェイスの表示
Ground Truth は、3D-2D オブジェクトの追跡注釈タスクを完了するためのウェブポータルとツールをワーカーに提供します。ラベル付けジョブを作成する場合は、Ground Truth UI の事前作成済みの UI の Amazon リソースネーム (ARN) を HumanTaskUiArn パラメータで指定します。API を使用してこのタスクタイプのラベル付けジョブを作成するときに UI を使用するには、HumanTaskUiArn を指定する必要があります。API を介してラベル付けジョブを作成するときに、ワーカー UI のプレビューと操作ができます。注釈ツールはワーカータスクインターフェイスの一部です。プレビューインターフェイスでは使用できません。次の図は、3D-2D 点群オブジェクトの追跡注釈タスクに使用されるワーカータスクインターフェイスを示しています。
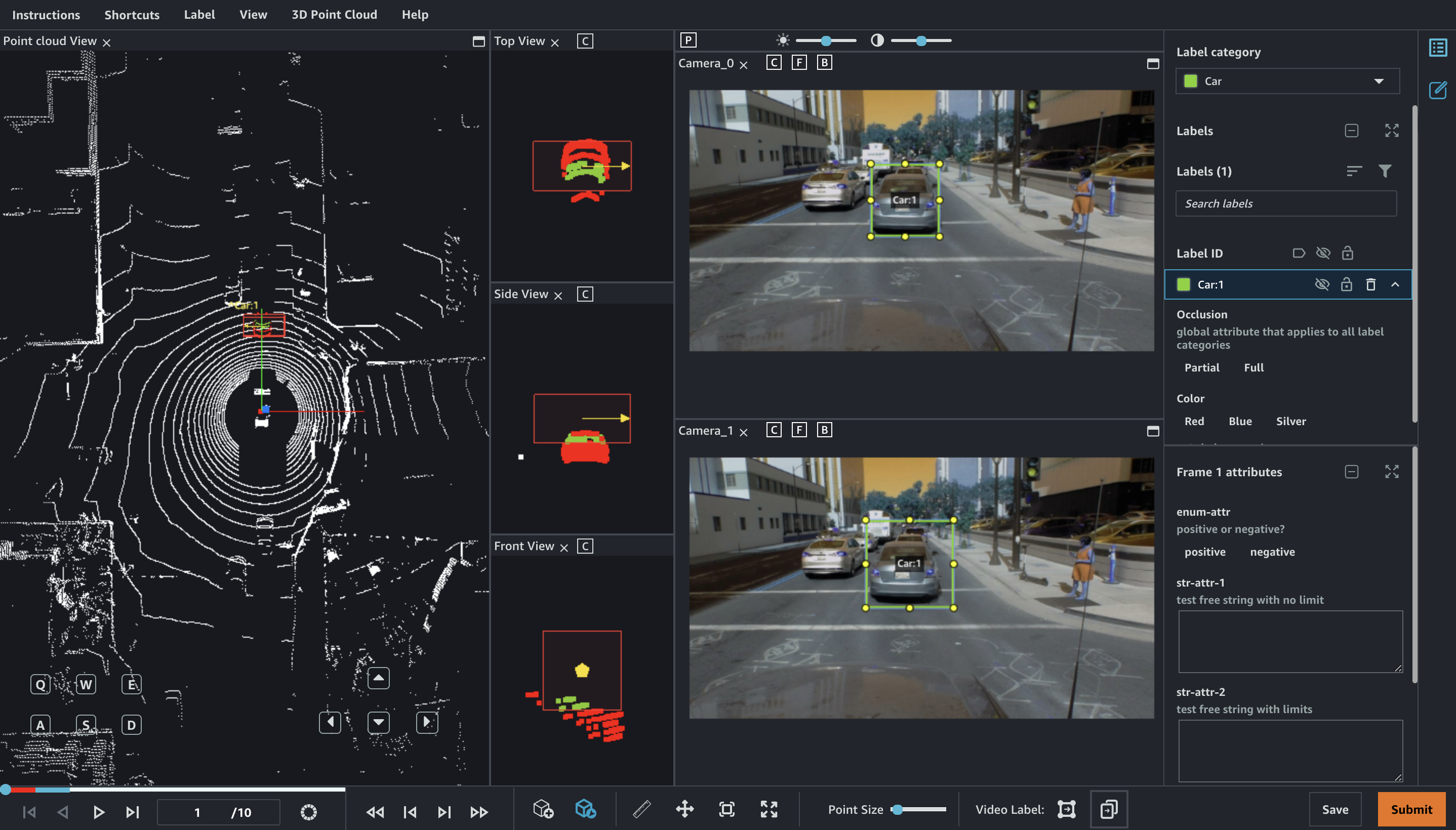
デフォルトで補間が有効になっている場合。ワーカーが直方体を 1 つ追加した後、その直方体が同じ ID を持つシーケンスのすべてのフレームに複製されます。ワーカーが別のフレームで直方体を調整した場合、Ground Truth はそのオブジェクトの動きを補間し、手動で調整したフレームに合わせてすべての直方体を調整します。さらに、[カメラビュー] セクションを使用すると、ワーカーにカメラ画像からの参照を提供する射影 (カメラビューの「ラベルを切り替える」の [B] ボタンを使用) 付きの直方体を表示できます。直方体の画像投影への精度は、外部データと組み込みデータにキャプチャされたキャリブレーションの精度に基づいています。
センサーフュージョン用のカメラのデータを用意すると、画像は点群フレームのシーンと重ね合わせられます。次の画像に示すように、シーケンスの各フレームで点群が正確に画像に描写されるように、カメラデータは点群データと時刻を同期させる必要があることにご注意ください。
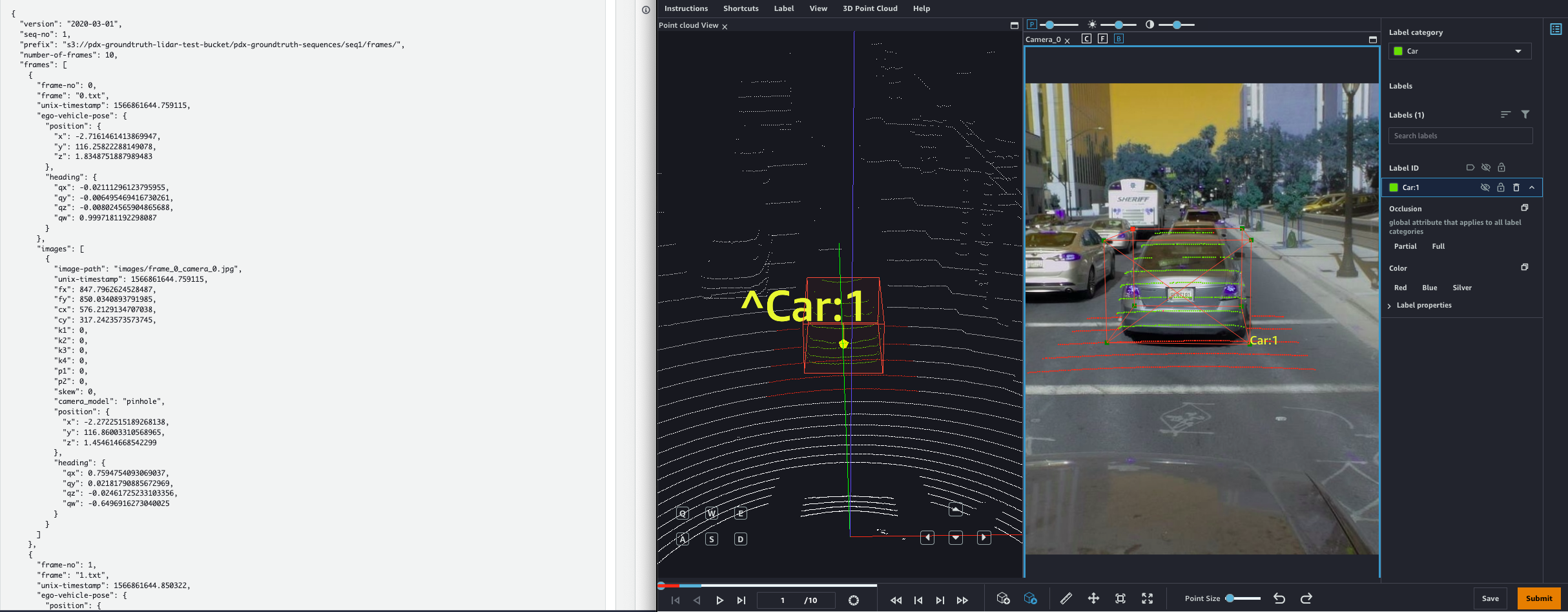
マニフェストファイルは、外部データ、固有データ、およびポーズを保持していて、[P] ボタンを使用してカメラ画像に直方体投影を表示できます。
キーボードとマウスを使用して 3D シーン内を移動操作できます。次の操作が可能です。
-
点群内の特定のオブジェクトをダブルクリックして、ズームインする。
-
マウスホイールまたはタッチパッドを使用して、点群を拡大または縮小する。
-
キーボードの矢印キーと、 [Q]、[E]、[A]、[D] キーの両方を使用して、上下左右に移動する。キーボードの [W] と [S] キーを使用して、拡大または縮小します。
ワーカーが 3D シーンに直方体を配置すると、側面図が 3 つの斜投影図 (上面、側面、前面) と一緒に表示されます。これらの側面ビューは、配置された直方体内とその周辺の点を表示し、その領域の直方体境界をより容易に絞り込めるようにします。ワーカーは、マウスを使用して、これらの各側面ビューをズームインまたはズームアウトできます。
ワーカーは最初に直方体を選択し、対応する境界ボックスを任意のカメラビューに描画する必要があります。これにより、直方体と境界ボックスが共通名と一意の ID でリンクされます。
ワーカーは最初に境界ボックスを描画し、それを選択してから対応する直方体を描画してリンクさせることもできます。
その他にも表示のオプションと機能が用意されています。ワーカー UI の全体的な説明については、ワーカー向け指示書のページを参照してください。
ワーカー用のツール
ワーカーは、マウスやキーボードのショートカットを使用することによって、3D 点群を拡大および縮小したり、点群の周囲をすべての方向に移動したりしてナビゲートすることができます。ワーカーが点群の点をクリックすると、UI では自動的にその領域が拡大されます。ワーカーは、さまざまなツールを使用してオブジェクトの周囲に 3D の直方体を描画できます。詳細については、次の説明の「Assistive Labeling Tools」を参照してください。
ワーカーが点群に 3D の点群を配置した後には、さまざまなビューを使用してそれらの直方体が車両の周囲にしっかりとフィットするように調整することができます。これは、3D の直方体から直接調整したり、直方体の周囲の点群を拡大した 3 つの側面図で調整したりすることができます。また、センサーフュージョン用の画像を含めている場合は、2D 画像から行うこともできます。
ワーカーがラベルのテキスト、地面のメッシュ、点の追加の属性を簡単に表示または非表示にできるその他の表示オプションもあります。透視投影と正投影のいずれかを選択することもできます。
ラベル付け支援ツール
Ground Truth は、UX、機械学習、コンピュータビジョンを活用した 3D 点群オブジェクトの追跡タスクのラベル付け支援ツールによって、ワーカーによる 3D 点群へのより早く正確な注釈付けを支援します。このタスクタイプでは、次のラベル付け支援ツールを使用できます。
-
ラベルの自動入力 - ワーカーがフレームに直方体を追加すると、その直方体と同じディメンション、向き、および XYZ 位置の立方体が自動的にシーケンスのすべてのフレームに追加されます。
-
ラベルの補間 - ワーカーが 1 つのオブジェクトに 2 つのフレームでラベルを付けると、Ground Truth はそれらの注釈を使用してすべてのフレームでオブジェクトの動きを補間します。ラベルの補間はオンとオフを切り替えることができます。デフォルトではオンです。例えば、5 つのフレームを操作しているワーカーがフレーム 2 に直方体を追加すると、5 つのフレームすべてにコピーされます。次に、ワーカーがフレーム 4 で調整を行うと、フレーム 2 と 4 は 2 つの点として機能するようになり、そこを通るように線がフィットします。その後、直方体はフレーム 1、3、5 で補間されます。
-
ラベルと属性の一括管理 - ワーカーは、注釈、ラベルカテゴリ属性、フレーム属性を一括で追加、削除、名前変更できます。
-
ワーカーは、フレームの前後、またはすべてのフレームの特定のオブジェクトの注釈を手動で削除できます。例えば、特定のオブジェクトがフレーム 10 より後のシーンに存在しなくなった場合、ワーカーはそのオブジェクトのフレーム 10 より後のラベルをすべて削除することができます。
-
ワーカーが特定のオブジェクトのすべての注釈を誤って一括で削除した場合、その注釈を元に戻すことができます。例えば、ワーカーが特定のオブジェクトのフレーム 100 より前の注釈をすべて削除した場合、それらのフレームに一括で注釈を追加することができます。
-
ワーカーが 1 つのフレームでラベルの名前を変更すると、そのラベルが割り当てられたすべての 3D の直方体のラベルの名前をすべてのフレームで更新することができます。
-
ワーカーは一括編集を使用して、複数のフレームでラベルカテゴリ属性とフレーム属性を追加または編集できます。
-
-
スナップ - ワーカーは、オブジェクトの境界の周囲に直方体を追加し、キーボードショートカットまたはメニューオプションを使用して、Ground Truth の自動フィットツールで直方体をオブジェクトの境界にしっかりとスナップさせることができます。
-
地面へのフィット - ワーカーが 3D シーンに直方体を追加した後、直方体を地面に自動的にスナップさせることができます。この機能を使用して、例えば、シーン内の道路または歩道に直方体をスナップさせることができます。
-
マルチビューラベル付け - 3D シーンに 3D の直方体を追加すると、サイドパネルに前面と 2 つの側面からの視点が表示されるため、オブジェクトの周囲に合わせて直方体をきっちりと調整できるようになります。ワーカーは、3D 点群に注釈を付けることができます。また、サイドパネルでの調整はリアルタイムで他のビューに表示されます。
-
センサーフュージョン - センサーフュージョン用のデータを提供すると、ワーカーは 3D シーンと 2D 画像で注釈の調整を行うことができます。また、注釈はリアルタイムで他のビューに投影されます。センサーフュージョンのデータの詳細については、「Understand Coordinate Systems and Sensor Fusion」を参照してください。
-
直方体の自動マージ - 別のラベルを持つ直方体が実際には 1 つのオブジェクトを表していることが判明した場合、ワーカーは 2 つの直方体をすべてのフレームで自動的にマージすることができます。
-
表示オプション - ワーカーがラベルのテキスト、地面のメッシュ、点の追加の属性 (色や反射強度など) を簡単に表示または非表示にすることができます。透視投影と正投影のいずれかを選択することもできます。
