기계 번역으로 제공되는 번역입니다. 제공된 번역과 원본 영어의 내용이 상충하는 경우에는 영어 버전이 우선합니다.
Espressif ESP32-DevKitC 및 ESP-WROVER-KIT 시작하기
중요
이 라이브러리는 더 이상 사용되지 않는 Amazon-FreeRTOS 리포지토리에서 호스팅됩니다. 새 프로젝트를 생성할 때는 여기서 시작하는 것이 좋습니다. 현재 사용되지 않는 Amazon-FreeRTOS 리포지토리를 기반으로 하는 기존 FreeRTOS 프로젝트가 이미 있는 경우에는 Amazon-FreeRTOS Github 리포지토리 마이그레이션 가이드 섹션을 참조하세요.
참고
자체 Espressif IDF 프로젝트 내에 FreeRTOS 모듈식 라이브러리 및 데모를 통합하는 방법을 알아보려면 eatured reference integration for ESP32-C3 platform
이 자습서에 따라 ESP32-WROOM-32, ESP32-SOLO-1 또는 ESP-WROVER 모듈 및 ESP-WROVER-KIT-VB가 장착된 Espressif ESP32-DevKitC를 시작합니다. AWS 파트너 디바이스 카탈로그의 파트너에서 구입하려면 다음 링크를 사용합니다.
이러한 개발 보드 버전이 FreeRTOS에서 지원됩니다.
이러한 보드의 최신 버전에 대한 자세한 내용은 Espressif 웹 사이트에서 ESP32-DevKitC
참고
현재 ESP32-WROVER-KIT 및 ESP DevKitC용 FreeRTOS 포트는 SMP(대칭적 다중 처리) 기능을 지원하지 않습니다.
개요
이 자습서에서는 다음과 같은 단계를 안내합니다.
-
보드를 호스트 시스템에 연결합니다.
-
마이크로 컨트롤러 보드용 내장형 애플리케이션을 개발 및 디버깅하기 위한 소프트웨어를 호스트 시스템에 설치합니다.
-
FreeRTOS 데모 애플리케이션을 바이너리 이미지로 크로스 컴파일합니다.
-
애플리케이션 바이너리 이미지를 보드에 로드한 후 애플리케이션을 실행합니다.
-
모니터링 및 디버깅을 위해 직렬 연결로 보드에서 실행되는 애플리케이션과 상호 작용합니다.
사전 조건
Espressif 보드에서 FreeRTOS를 시작하기 전에 AWS 계정과 권한을 설정해야 합니다.
에 가입 AWS 계정
이 없는 경우 다음 단계를 AWS 계정완료하여 생성합니다.
에 가입하려면 AWS 계정
온라인 지시 사항을 따릅니다.
가입 절차의 일부로는 전화 또는 문자 메시지를 수신하고 전화 키패드에 확인 코드를 입력하는 것이 포함됩니다.
에 가입하면 AWS 계정AWS 계정 루트 사용자이 생성됩니다. 루트 사용자에게는 계정의 모든 AWS 서비스 및 리소스에 액세스할 권한이 있습니다. 보안 모범 사례는 사용자에게 관리 액세스 권한을 할당하고, 루트 사용자만 사용하여 루트 사용자 액세스 권한이 필요한 작업을 수행하는 것입니다.
AWS 는 가입 프로세스가 완료된 후 확인 이메일을 보냅니다. 언제든지 https://aws.amazon.com/
관리자 액세스 권한이 있는 사용자 생성
에 가입한 후 일상적인 작업에 루트 사용자를 사용하지 않도록 관리 사용자를 AWS 계정보호 AWS IAM Identity Center, AWS 계정 루트 사용자활성화 및 생성합니다.
보안 AWS 계정 루트 사용자
-
루트 사용자를 선택하고 AWS 계정 이메일 주소를 입력하여 계정 소유자AWS Management Console
로에 로그인합니다. 다음 페이지에서 비밀번호를 입력합니다. 루트 사용자를 사용하여 로그인하는 데 도움이 필요하면 AWS 로그인 User Guide의 루트 사용자로 로그인을 참조하세요.
-
루트 사용자의 다중 인증(MFA)을 활성화합니다.
지침은 IAM 사용 설명서의 AWS 계정 루트 사용자(콘솔)에 대한 가상 MFA 디바이스 활성화를 참조하세요.
관리자 액세스 권한이 있는 사용자 생성
-
IAM Identity Center를 활성화합니다.
지침은 AWS IAM Identity Center 사용 설명서의 AWS IAM Identity Center설정을 참조하세요.
-
IAM Identity Center에서 사용자에게 관리 액세스 권한을 부여합니다.
를 자격 증명 소스 IAM Identity Center 디렉터리 로 사용하는 방법에 대한 자습서는 사용 AWS IAM Identity Center 설명서의 기본값으로 사용자 액세스 구성을 IAM Identity Center 디렉터리 참조하세요.
관리 액세스 권한이 있는 사용자로 로그인
-
IAM IDentity Center 사용자로 로그인하려면 IAM Identity Center 사용자를 생성할 때 이메일 주소로 전송된 로그인 URL을 사용합니다.
IAM Identity Center 사용자를 사용하여 로그인하는 데 도움이 필요하면 AWS 로그인 사용 설명서의 AWS 액세스 포털에 로그인을 참조하세요.
추가 사용자에게 액세스 권한 할당
-
IAM Identity Center에서 최소 권한 적용 모범 사례를 따르는 권한 세트를 생성합니다.
지침은AWS IAM Identity Center 사용 설명서의 Create a permission set를 참조하세요.
-
사용자를 그룹에 할당하고, 그룹에 Single Sign-On 액세스 권한을 할당합니다.
지침은 AWS IAM Identity Center 사용 설명서의 Add groups를 참조하세요.
액세스 권한을 제공하려면 사용자, 그룹 또는 역할에 권한을 추가하세요:
-
의 사용자 및 그룹 AWS IAM Identity Center:
권한 세트를 생성합니다. AWS IAM Identity Center 사용 설명서의 권한 세트 생성의 지침을 따릅니다.
-
보안 인증 공급자를 통해 IAM에서 관리되는 사용자:
ID 페더레이션을 위한 역할을 생성합니다. IAM 사용 설명서의 Create a role for a third-party identity provider (federation)의 지침을 따릅니다.
-
IAM 사용자:
-
사용자가 맡을 수 있는 역할을 생성합니다. IAM 사용 설명서에서 Create a role for an IAM user의 지침을 따릅니다.
-
(권장되지 않음)정책을 사용자에게 직접 연결하거나 사용자를 사용자 그룹에 추가합니다. IAM 사용 설명서에서 사용자(콘솔)에 권한 추가의 지침을 따르세요.
-
시작
참고
이 자습서의 Linux 명령을 사용하려면 Bash 쉘을 사용해야 합니다.
-
Espressif 하드웨어 설정.
-
ESP32-DevKitC 개발 보드 하드웨어를 설정하는 방법에 대한 정보는 ESP32-DevKitC V4 Getting Started Guide
를 참조하세요. -
ESP-WROVER-KIT 개발 보드 하드웨어를 설정하는 방법에 대한 정보는 ESP-WROVER-KIT V4.1 Getting Started Guide
를 참조하세요.
중요
Espressif 안내서의 다음 단계 섹션에 도달하면 여기서 멈추고 이 페이지의 지침으로 돌아갑니다.
-
-
GitHub
에서Amazon FreeRTOS를 다운로드합니다. (자세한 지침은 README.md 파일을 참조하세요.) -
개발 환경 설정.
보드와 통신하려면 도구 체인을 설치해야 합니다. Espressif는 보드용 소프트웨어를 개발할 수 있는 ESP-IDF를 제공합니다. ESP-IDF에는 자체 버전의 FreeRTOS 커널이 구성 요소로 통합되어 있으므로 Amazon FreeRTOS에는 FreeRTOS 커널이 제거된 사용자 지정 버전의 ESP-IDF v4.2가 포함되어 있습니다. 그러므로 컴파일할 때 파일이 중복되는 문제가 해결됩니다. Amazon FreeRTOS에 포함된 ESP-IDF v4.2의 사용자 지정 버전을 사용하려면 호스트 시스템의 운영 체제에 따라 아래 지침을 따릅니다.
Windows
-
ESP-IDF의 Windows용 범용 온라인 설치 관리자
를 다운로드합니다. -
범용 온라인 설치 관리자를 실행합니다.
-
ESP-IDF 다운로드 또는 사용 단계에 도달하면 기존 ESP-IDF 디렉터리 사용을 선택하고 기존 ESP-IDF 디렉터리 선택을
freertos/vendors/espressif/esp-idf -
설치를 완료합니다.
macOS
-
Standard Setup of Toolchain prerequisites (ESP-IDF v4.2) for macOS
의 지침을 따릅니다. 중요
다음 단계의 ‘ESP-IDF 가져오기’ 지침에 도달하면 여기서 멈추고 이 페이지의 지침으로 돌아옵니다.
-
명령줄 창을 엽니다.
-
FreeRTOS 다운로드 디렉터리로 이동한 후, 다음 스크립트를 실행하여 플랫폼에 해당하는 espressif 도구 체인을 다운로드하고 설치합니다.
vendors/espressif/esp-idf/install.sh -
다음 명령을 사용하여 터미널 경로에 ESP-IDF 도구 체인 도구를 추가합니다.
source vendors/espressif/esp-idf/export.sh
Linux
-
Standard Setup of Toolchain prerequisites (ESP-IDF v4.2) for Linux
의 지침을 따릅니다. 중요
다음 단계의 ‘ESP-IDF 가져오기’ 지침에 도달하면 여기서 멈추고 이 페이지의 지침으로 돌아옵니다.
-
명령줄 창을 엽니다.
-
FreeRTOS 다운로드 디렉터리로 이동한 후, 다음 스크립트를 실행하여 플랫폼에 해당하는 Espressif 도구 체인을 다운로드하고 설치합니다.
vendors/espressif/esp-idf/install.sh -
다음 명령을 사용하여 터미널 경로에 ESP-IDF 도구 체인 도구를 추가합니다.
source vendors/espressif/esp-idf/export.sh
-
-
직렬 연결 설정.
-
호스트 시스템과 ESP32-DevKitC 사이에 직렬 연결을 설정하려면 CP210x USB to UART Bridge VCP 드라이버를 설치해야 합니다. Silicon Labs
에서 이러한 드라이버를 다운로드할 수 있습니다. 호스트 시스템과 ESP32-WROVER-KIT 사이에 직렬 연결을 설정하려면 FTDI 가상 COM 포트 드라이버를 설치해야 합니다. FTDI
에서 이 드라이버를 다운로드할 수 있습니다. -
Establish Serial Connection with ESP32
단계를 따릅니다. -
직렬 연결을 설정한 후 보드의 연결을 위한 직렬 포트를 기록해 두십시오. 데모를 플래시하는 데 필요합니다.
-
FreeRTOS 데모 애플리케이션 구성
이 자습서의 경우 FreeRTOS 구성 파일은 freertos/vendors/espressif/boards/board-name/aws_demos/config_files/FreeRTOSConfig.hAFR_BOARD espressif.esp32_devkitc를 선택하면 구성 파일은 freertos/vendors/espressif/boards/esp32/aws_demos/config_files/FreeRTOSConfig.h
-
macOS 또는 Linux를 실행하는 경우 터미널 프롬프트를 엽니다. Windows를 실행 중인 경우 'ESP-IDF 4.x CMD' 앱(ESP-IDF 도구 체인을 설치할 때 이 옵션을 포함한 경우)을 열고, 그렇지 않으면 '명령 프롬프트' 앱을 엽니다.
-
Python3이 설치되어 있는지 확인하려면 다음을 실행합니다.
python --version설치된 버전이 표시됩니다. Python 3.0.1 이상이 설치되어 있지 않으면 Python
웹 사이트에서 설치할 수 있습니다. -
AWS IoT 명령을 실행하려면 AWS 명령줄 인터페이스(CLI)가 필요합니다. Windows를 실행하는 경우
easy_install awscli명령을 사용하여 "Command" 또는 "ESP-IDF 4.x CMD" 앱에 AWS CLI를 설치합니다.macOS 또는 Linux를 실행하는 경우 AWS CLI 설치를 참조하세요.
-
Run
aws configure액세스 키 ID, 보안 AWS 액세스 키 및 기본 AWS 리전을 사용하여 AWS CLI를 구성합니다. 자세한 내용은 AWS CLI 구성을 참조하세요.
-
다음 명령을 사용하여 AWS SDK for Python(boto3)을 설치합니다.
-
Windows에서는 'Command' 또는 'ESP-IDF 4.x CMD' 앱에서 다음을 실행합니다.
pip install boto3 --user참고
자세한 내용은 Boto3 설명서
를 참조하세요. -
macOS 또는 Linux에서는 다음을 실행합니다.
pip install tornado nose --user계속해서 다음을 실행합니다.
pip install boto3 --user
FreeRTOS에는 AWS IoT에 연결하기 위해 Espressif 보드를 더 쉽게 설정할 수 있게 해주는
SetupAWS.py스크립트가 포함되어 있습니다. 스크립트를 구성하려면freertos/tools/aws_config_quick_start/configure.jsonafr_source_dir-
컴퓨터에서
freertos thing_name-
보드를 나타내는 AWS IoT 사물에 할당하려는 이름입니다.
wifi_ssid-
Wi-Fi 네트워크의 SSID입니다.
wifi_password-
Wi-Fi 네트워크의 암호입니다.
wifi_security-
Wi-Fi 네트워크의 보안 유형입니다.
유효한 보안 유형은 다음과 같습니다.
-
eWiFiSecurityOpen(열림, 보안 없음) -
eWiFiSecurityWEP(WEP 보안) -
eWiFiSecurityWPA(WPA 보안) -
eWiFiSecurityWPA2(WPA2 보안)
-
-
-
구성 스크립트를 실행합니다.
-
macOS 또는 Linux를 실행하는 경우 터미널 프롬프트를 엽니다. Windows를 실행 중인 경우 'Command' 또는 'ESP-IDF 4.x CMD' 앱을 엽니다.
-
freertos/tools/aws_config_quick_startpython SetupAWS.py setup스크립트는 다음 작업을 수행합니다.
-
IoT 사물, 인증서 및 정책을 생성합니다.
-
이 스크립트는 IoT 정책을 인증서에 연결하고 인증서를 AWS IoT 사물에 연결합니다.
-
aws_clientcredential.h파일을 AWS IoT 엔드포인트, Wi-Fi SSID 및 보안 인증 정보로 채웁니다. -
인증서와 프라이빗 키에 형식을 지정하고
aws_clientcredential_keys.h헤더 파일에 기록합니다.
참고
인증서는 데모 용도로만 하드 코딩됩니다. 프로덕션 수준 애플리케이션은 이러한 파일을 보안 위치에 저장해야 합니다.
SetupAWS.py에 대한 자세한 내용은freertos/tools/aws_config_quick_startREADME.md파일을 참조하세요. -
-
클라우드에서 MQTT 메시지 모니터링
FreeRTOS 데모 프로젝트를 실행하기 전에 AWS IoT 콘솔에서 MQTT 클라이언트를 설정하여 디바이스가 AWS 클라우드로 보내는 메시지를 모니터링할 수 있습니다.
MQTT 클라이언트를 사용하여 AWS IoT MQTT 주제를 구독하려면
-
AWS IoT 콘솔
로 이동합니다. -
탐색 창에서 테스트를 선택하고 MQTT 테스트 클라이언트를 선택합니다.
-
구독 주제에
your-thing-name/example/topic
데모 프로젝트가 디바이스에서 성공적으로 실행되면 ‘Hello World!’가 구독한 주제로 여러 번 전송된 것을 볼 수 있습니다.
idf.py 스크립트를 사용하여 FreeRTOS 데모 프로젝트 빌드, 플래시 및 실행
Espressif의 IDF 유틸리티(idf.py)를 사용하여 프로젝트를 빌드하고 바이너리를 디바이스에 플래시할 수 있습니다.
참고
다음 예제와 같이 일부 설정에서는 idf.py에서 포트 옵션 "-p port-name"을 사용하여 올바른 포트를 지정해야 할 수도 있습니다.
idf.py -p /dev/cu.usbserial-00101301B flash
Windows, Linux 및 macOS에서 FreeRTOS 빌드 및 플래시(ESP-IDF v4.2)
-
FreeRTOS 다운로드 디렉터리의 루트로 이동합니다.
-
명령줄 창에서 다음 명령을 입력하여 ESP-IDF 도구를 터미널의 경로에 추가합니다.
- Windows('Command' 앱)
-
vendors\espressif\esp-idf\export.bat - Windows('ESP-IDF 4.x CMD' 앱)
-
(앱을 열었을 때 이미 완료되었습니다.)
- Linux/macOS
-
source vendors/espressif/esp-idf/export.sh
-
build디렉터리에서 cmake를 구성하고 다음 명령을 사용하여 펌웨어 이미지를 빌드합니다.idf.py -DVENDOR=espressif -DBOARD=esp32_wrover_kit -DCOMPILER=xtensa-esp32 build그러면 다음과 같은 결과가 표시됩니다.
Running cmake in directory /path/to/hello_world/build Executing "cmake -G Ninja --warn-uninitialized /path/to/hello_world"... Warn about uninitialized values. -- Found Git: /usr/bin/git (found version "2.17.0") -- Building empty aws_iot component due to configuration -- Component names: ... -- Component paths: ... ... (more lines of build system output) [527/527] Generating hello-world.bin esptool.py v2.3.1 Project build complete. To flash, run this command: ../../../components/esptool_py/esptool/esptool.py -p (PORT) -b 921600 write_flash --flash_mode dio --flash_size detect --flash_freq 40m 0x10000 build/hello-world.bin build 0x1000 build/bootloader/bootloader.bin 0x8000 build/partition_table/partition-table.bin or run 'idf.py -p PORT flash'오류가 없는 경우 빌드는 펌웨어 바이너리 .bin 파일을 생성합니다.
-
다음 명령을 사용하여 개발 보드의 플래시 메모리를 지웁니다.
idf.py erase_flash -
idf.py스크립트를 사용하여 애플리케이션 바이너리를 보드에 플래시합니다.idf.py flash -
다음 명령을 사용하여 보드의 직렬 포트 출력을 모니터링합니다.
idf.py monitor참고
다음 예제와 같이 이들 명령을 결합할 수 있습니다.
idf.py erase_flash flash monitor특정 호스트 시스템 설정의 경우 다음 예제와 같이 보드를 플래시할 때 포트를 지정해야 합니다.
idf.py erase_flash flash monitor -p /dev/ttyUSB1
CMake를 사용하여 FreeRTOS 빌드 및 플래시
IDF SDK에서 제공하는 idf.py 스크립트를 사용하여 코드를 빌드하고 실행하는 방법 외에도 CMake를 사용하여 프로젝트를 빌드할 수도 있습니다. 현재는 Unix Makefile 또는 Ninja 빌드 시스템을 지원합니다.
프로젝트를 빌드하고 플래시하려면
-
명령줄 창에서 FreeRTOS 다운로드 디렉터리의 루트로 이동합니다.
-
다음 스크립트를 실행하여 ESP-IDF 도구를 쉘의 경로에 추가합니다.
- Windows
-
vendors\espressif\esp-idf\export.bat - Linux/macOS
-
source vendors/espressif/esp-idf/export.sh
-
다음 명령을 입력하여 빌드 파일을 생성합니다.
- Unix Makefile 사용
-
cmake -DVENDOR=espressif -DBOARD=esp32_wrover_kit -DCOMPILER=xtensa-esp32 -S . -B ./YOUR_BUILD_DIRECTORY -DAFR_ENABLE_ALL_MODULES=1 -DAFR_ENABLE_TESTS=0 - Ninja 사용
-
cmake -DVENDOR=espressif -DBOARD=esp32_wrover_kit -DCOMPILER=xtensa-esp32 -S . -B ./YOUR_BUILD_DIRECTORY -DAFR_ENABLE_ALL_MODULES=1 -DAFR_ENABLE_TESTS=0 -GNinja
-
프로젝트를 빌드합니다.
- Unix Makefile 사용
-
make -C ./YOUR_BUILD_DIRECTORY -j8 - Ninja 사용
-
ninja -C ./YOUR_BUILD_DIRECTORY -j8
-
플래시를 지운 다음 보드를 플래시합니다.
- Unix Makefile 사용
-
make -C ./YOUR_BUILD_DIRECTORY erase_flashmake -C ./YOUR_BUILD_DIRECTORY flash - Ninja 사용
-
ninja -C ./YOUR_BUILD_DIRECTORY erase_flashninja -C ./YOUR_BUILD_DIRECTORY flash
Bluetooth Low-Energy 데모 실행
FreeRTOS는 Bluetooth Low Energy 라이브러리 연결을 지원합니다.
Bluetooth Low Energy에서 FreeRTOS 데모 프로젝트를 실행하려면 iOS 또는 Android 모바일 디바이스에서 FreeRTOS Bluetooth Low Energy Mobile SDK 데모 애플리케이션을 실행해야 합니다.
FreeRTOS Bluetooth Low Energy Mobile SDK 데모 애플리케이션을 설정하려면
-
FreeRTOS Bluetooth 디바이스용 Mobile SDK의 지침에 따라 모바일 플랫폼용 SDK를 다운로드하여 호스트 컴퓨터에 설치합니다.
-
FreeRTOS Bluetooth Low Energy Mobile SDK 데모 애플리케이션의 지침에 따라 모바일 디바이스에서 데모 모바일 애플리케이션을 설정합니다.
보드에서 MQTT over Bluetooth Low Energy 데모를 실행하는 방법에 대한 자세한 내용은 MQTT over Bluetooth Low Energy를 참조하세요.
보드에서 Wi-Fi 프로비저닝 데모를 실행하는 방법에 대한 자세한 내용은 Wi-Fi 프로비저닝을 참조하세요.
ESP32를 위한 자체 CMake 프로젝트에서 FreeRTOS 사용
자체 CMake 프로젝트에서 FreeRTOS를 사용하려면 하위 디렉터리로 설정하고 애플리케이션과 함께 빌드할 수 있습니다. 먼저 GitHub
git submodule add -b release https://github.com/aws/amazon-freertos.git freertos
최신 버전이 릴리스된 경우 다음 명령을 사용하여 로컬 복사본을 업데이트할 수 있습니다.
# Pull the latest changes from the remote tracking branch. git submodule update --remote -- freertos
# Commit the submodule change because it is pointing to a different revision now. git add freertos
git commit -m "Update FreeRTOS to a new release"
프로젝트에 다음과 같은 디렉터리 구조가 있는 경우
- freertos (the copy that you obtained from GitHub or the AWS IoT console) - src - main.c (your application code) - CMakeLists.txt
다음은 FreeRTOS와 함께 애플리케이션을 빌드하는 데 사용할 수 있는 최상위 CMakeLists.txt 파일의 예제입니다.
cmake_minimum_required(VERSION 3.13) project(freertos_examples) # Tell IDF build to link against this target. set(IDF_EXECUTABLE_SRCS "<complete_path>/src/main.c") set(IDF_PROJECT_EXECUTABLE my_app) # Add FreeRTOS as a subdirectory. AFR_BOARD tells which board to target. set(AFR_BOARD espressif.esp32_devkitc CACHE INTERNAL "") add_subdirectory(freertos) # Link against the mqtt library so that we can use it. Dependencies are transitively # linked. target_link_libraries(my_app PRIVATE AFR::core_mqtt)
프로젝트를 빌드하려면 다음 CMake 명령을 실행합니다. ESP32 컴파일러가 PATH 환경 변수에 있는지 확인하십시오.
cmake -S . -B build-directory -DCMAKE_TOOLCHAIN_FILE=freertos/tools/cmake/toolchains/xtensa-esp32.cmake -GNinja
cmake --build build-directory
애플리케이션을 보드에 플래시하려면 다음 명령을 실행합니다.
cmake --build build-directory --target flash
FreeRTOS의 구성 요소 사용
CMake를 실행한 후에는 요약 출력에서 사용 가능한 모든 구성 요소를 찾을 수 있습니다. 다음 예제와 비슷합니다.
====================Configuration for FreeRTOS==================== Version: 202107.00 Git version: 202107.00-g79ad6defb Target microcontroller: vendor: Espressif board: ESP32-DevKitC description: Development board produced by Espressif that comes in two variants either with ESP-WROOM-32 or ESP32-WROVER module family: ESP32 data ram size: 520KB program memory size: 4MB Host platform: OS: Linux-4.15.0-66-generic Toolchain: xtensa-esp32 Toolchain path: /opt/xtensa-esp32-elf CMake generator: Ninja FreeRTOS modules: Modules to build: backoff_algorithm, common, common_io, core_http, core_http_demo_dependencies, core_json, core_mqtt, core_mqtt_agent, core_mqtt_agent_demo_dependencies, core_mqtt_demo_dependencies, crypto, defender, dev_mode_key_ provisioning, device_defender, device_defender_demo_ dependencies, device_shadow, device_shadow_demo_dependencies, freertos_cli_plus_uart, freertos_plus_cli, greengrass, http_demo_helpers, https, jobs, jobs_demo_dependencies, kernel, logging, mqtt, mqtt_agent_interface, mqtt_demo_ helpers, mqtt_subscription_manager, ota, ota_demo_ dependencies, ota_demo_version, pkcs11, pkcs11_helpers, pkcs11_implementation, pkcs11_utils, platform, secure_sockets, serializer, shadow, tls, transport_interface_secure_sockets, wifi Enabled by user: common_io, core_http_demo_dependencies, core_json, core_mqtt_agent_demo_dependencies, core_mqtt_demo_ dependencies, defender, device_defender, device_defender_demo_ dependencies, device_shadow, device_shadow_demo_dependencies, freertos_cli_plus_uart, freertos_plus_cli, greengrass, https, jobs, jobs_demo_dependencies, logging, ota_demo_dependencies, pkcs11, pkcs11_helpers, pkcs11_implementation, pkcs11_utils, platform, secure_sockets, shadow, wifi Enabled by dependency: backoff_algorithm, common, core_http, core_mqtt, core_mqtt_agent, crypto, demo_base, dev_mode_key_provisioning, freertos, http_demo_helpers, kernel, mqtt, mqtt_agent_ interface, mqtt_demo_helpers, mqtt_subscription_manager, ota, ota_demo_version, pkcs11_mbedtls, serializer, tls, transport_interface_secure_sockets, utils 3rdparty dependencies: jsmn, mbedtls, pkcs11, tinycbor Available demos: demo_cli_uart, demo_core_http, demo_core_mqtt, demo_core_mqtt_ agent, demo_device_defender, demo_device_shadow, demo_greengrass_connectivity, demo_jobs, demo_ota_core_http, demo_ota_core_mqtt, demo_tcp Available tests: =========================================================================
Modules to build 목록에서 모든 구성 요소를 참조할 수 있습니다. 애플리케이션에 연결하려면 이름 앞에 AFR:: 네임스페이스를 추가합니다(예: AFR::core_mqtt, AFR::ota, 등).
ESP-IDF를 사용하여 사용자 지정 구성 요소 추가
ESP-IDF를 사용하는 동안 더 많은 구성 요소를 추가할 수 있습니다. 예를 들어, example_component라는 구성 요소를 추가하려는 경우 프로젝트는 다음과 같습니다.
- freertos - components - example_component - include - example_component.h - src - example_component.c - CMakeLists.txt - src - main.c - CMakeLists.txt
다음은 구성 요소에 대한 CMakeLists.txt 파일 예제입니다.
add_library(example_componentsrc/example_component.c) target_include_directories(example_componentPUBLIC include)
그런 다음 최상위 CMakeLists.txt 파일에서 add_subdirectory(freertos) 바로 뒤에 다음 줄을 삽입하여 구성 요소를 추가합니다.
add_subdirectory(component/example_component)
그런 다음 구성 요소를 포함하도록 target_link_libraries를 수정합니다.
target_link_libraries(my_app PRIVATE AFR::core_mqtt PRIVATEexample_component)
이 구성 요소는 이제 기본적으로 애플리케이션 코드에 자동 연결됩니다. 이제 헤더 파일을 포함하고 구성 요소가 정의하는 함수를 직접 호출할 수 있습니다.
FreeRTOS 구성 재정의
현재 FreeRTOS 소스 트리 외부에서 구성을 재정의하기 위한 잘 정의된 접근 방식은 없습니다. 기본적으로 CMake는 freertos/vendors/espressif/boards/esp32/aws_demos/config_files/freertos/demos/include/
- freertos - freertos-configs - aws_clientcredential.h - aws_clientcredential_keys.h - iot_mqtt_agent_config.h - iot_config.h - components - src - CMakeLists.txt
freertos-configs의 파일은 freertos/vendors/espressif/boards/esp32/aws_demos/config_files/freertos/demos/include/CMakeLists.txt 파일에서 컴파일러가 이 디렉터리를 먼저 검색하도록 add_subdirectory(freertos) 앞에 이 줄을 추가합니다.
include_directories(BEFORE freertos-configs)
ESP-IDF를 위한 자체 sdkconfig 제공
자체 sdkconfig.default를 제공하려는 경우 명령줄에서 CMake 변수 IDF_SDKCONFIG_DEFAULTS를 설정할 수 있습니다.
cmake -S . -B build-directory -DIDF_SDKCONFIG_DEFAULTS=path_to_your_sdkconfig_defaults -DCMAKE_TOOLCHAIN_FILE=freertos/tools/cmake/toolchains/xtensa-esp32.cmake -GNinja
자체 sdkconfig.default 파일에 대한 위치를 지정하지 않으면 FreeRTOS가 freertos/vendors/espressif/boards/esp32/aws_demos/sdkconfig.defaults
자세한 내용은 Espressif API Reference의 Project Configuration
요약
example_component라는 구성 요소가 있는 프로젝트에서 일부 구성을 재정의하려는 경우 여기에 최상위 CMakeLists.txt 파일의 전체 예는 다음과 같습니다.
cmake_minimum_required(VERSION 3.13) project(freertos_examples) set(IDF_PROJECT_EXECUTABLE my_app) set(IDF_EXECUTABLE_SRCS "src/main.c") # Tell IDF build to link against this target. set(IDF_PROJECT_EXECUTABLE my_app) # Add some extra components. IDF_EXTRA_COMPONENT_DIRS is a variable used by ESP-IDF # to collect extra components. get_filename_component( EXTRA_COMPONENT_DIRS "components/example_component" ABSOLUTE ) list(APPEND IDF_EXTRA_COMPONENT_DIRS ${EXTRA_COMPONENT_DIRS}) # Override the configurations for FreeRTOS. include_directories(BEFORE freertos-configs) # Add FreeRTOS as a subdirectory. AFR_BOARD tells which board to target. set(AFR_BOARD espressif.esp32_devkitc CACHE INTERNAL "") add_subdirectory(freertos) # Link against the mqtt library so that we can use it. Dependencies are transitively # linked. target_link_libraries(my_app PRIVATE AFR::core_mqtt)
문제 해결
-
macOS를 실행하는데 운영 체제에서 ESP-WROVER-KIT를 인식하지 못하면 D2XX 드라이버가 설치되어 있지 않은지 확인합니다. 이를 제거하려면 macOS X용 FTDI 드라이버 설치 가이드
의 지침을 따르십시오. -
ESP-IDF에서 제공하는 모니터 유틸리티(make 모니터를 사용하여 간접 호출)를 사용하면 주소를 디코딩할 수 있습니다. 이러한 이유로 이 유틸리티는 애플리케이션이 작동을 멈추는 경우 의미 있는 역추적을 얻는 데 도움이 될 수 있습니다. 자세한 내용은 Espressif 웹사이트의 Automatic Address Decoding
을 참조하세요. -
특수 JTAG 하드웨어를 사용할 필요 없이 gdb와 통신하기 위해 GDBstub를 활성화할 수도 있습니다. 자세한 내용은 Espressif 웹사이트의 Launching GDB with GDBStub
을 참조하세요. -
JTAG 하드웨어 기반 디버깅이 필요한 경우 OpenOCD 기반 환경 설정에 대한 자세한 내용은 Espressif 웹 사이트의 JTAG Debugging
을 참조하세요. -
macOS에서
pip를 사용하여pyserial을 설치할 수 없는 경우 pyserial 웹 사이트에서 다운로드합니다. -
보드가 연속적으로 재설정되는 경우 터미널에 다음 명령을 입력하여 플래시를 지워 봅니다.
make erase_flash -
idf_monitor.py를 실행할 때 오류가 나타나는 경우 Python 2.7을 사용합니다. -
ESP-IDF의 필수 라이브러리는 FreeRTOS에 포함되어 있으므로 외부에서 다운로드할 필요가 없습니다.
IDF_PATH환경 변수가 설정된 경우 FreeRTOS를 빌드하기 전에 제거하는 것이 좋습니다. -
Window에서 프로젝트를 빌드하려면 3-4분 정도 걸릴 수 있습니다. make 명령에서
-j4스위치를 사용하여 빌드 시간을 줄일 수 있습니다.make flash monitor -j4 -
디바이스에 연결하는 데 문제가 있는 경우
aws_clientcredential.h파일을 AWS IoT열고 구성 변수가 파일에 올바르게 정의되어 있는지 확인합니다.는와 같아clientcredentialMQTT_BROKER_ENDPOINT[]야 합니다1234567890123-ats.iot.us-east-1.amazonaws.com. -
ESP32를 위한 자체 CMake 프로젝트에서 FreeRTOS 사용의 단계를 따르고 링커에서 정의되지 않은 참조 오류가 표시되는 경우 일반적으로 종속 라이브러리 또는 데모가 누락되어 발생합니다. 이를 추가하려면 표준 CMake 함수
target_link_libraries를 사용하여 루트 디렉터리 아래의CMakeLists.txt파일을 업데이트합니다. -
ESP-IDF v4.2는 xtensa\-esp32\-elf\-gcc 8\.2\.0\. 도구 체인 사용을 지원합니다. 이전 버전의 Xtensa 도구 체인을 사용하는 경우 필요한 버전을 다운로드하세요.
-
ESP-IDF v4.2에서 충족되지 않는 python 종속성 때문에 다음과 같은 오류 로그가 표시되는 경우
The following Python requirements are not satisfied: click>=5.0 pyserial>=3.0 future>=0.15.2 pyparsing>=2.0.3,<2.4.0 pyelftools>=0.22 gdbgui==0.13.2.0 pygdbmi<=0.9.0.2 reedsolo>=1.5.3,<=1.5.4 bitstring>=3.1.6 ecdsa>=0.16.0 Please follow the instructions found in the "Set up the tools" section of ESP-IDF Getting Started Guide다음 Python 명령을 사용하여 플랫폼에 python 종속성을 설치합니다.
root/vendors/espressif/esp-idf/requirements.txt
문제 해결에 대한 자세한 정보는 시작하기 문제 해결 섹션을 참조하세요.
디버깅
Espressif ESP32-DevKitC 및 ESP-WROVER-KIT에서 코드 디버깅(ESP-IDF v4.2)
이 섹션에서는 ESP-IDF v4.2를 사용하여 Espressif 하드웨어를 디버깅하는 방법을 보여줍니다. JTAG - USB 케이블이 필요합니다. 여기서는 USB-MPSSE 케이블을 사용합니다(예: FTDI C232HM-DDHSL-0
- ESP-DevKitC JTAG 설정
-
FTDI C232HM-DDHSL-0 케이블의 경우 다음은 ESP32 DevkitC에 대한 연결입니다.
| C232HM-DDHSL-0 Wire Color | ESP32 GPIO Pin | JTAG Signal Name | | ------------------------- | -------------- | ---------------- | | Brown (pin 5) | IO14 | TMS | | Yellow (pin 3) | IO12 | TDI | | Black (pin 10) | GND | GND | | Orange (pin 2) | IO13 | TCK | | Green (pin 4) | IO15 | TDO | - ESP-WROVER-KIT JTAG 설정
-
FTDI C232HM-DDHSL-0 케이블의 경우 다음은 ESP32-WROVER-KIT에 대한 연결입니다.
| C232HM-DDHSL-0 Wire Color | ESP32 GPIO Pin | JTAG Signal Name | | ------------------------- | -------------- | ---------------- | | Brown (pin 5) | IO14 | TMS | | Yellow (pin 3) | IO12 | TDI | | Orange (pin 2) | IO13 | TCK | | Green (pin 4) | IO15 | TDO |이러한 테이블은 FTDI C232HM-DDHSL-0 데이터시트
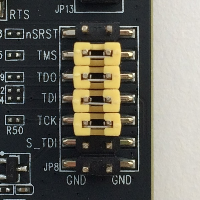
에서 개발되었습니다. 자세한 내용은 데이터시트에서 ‘C232HM MPSSE Cable Connection and Mechanical Details’ 섹션을 참조하세요. ESP-WROVER-KIT에서 JTAG를 활성화하려면 TMS, TDO, TDI, TCK, and S_TDI 핀의 점퍼를 다음과 같이 배치합니다.
- Windows에서의 디버깅(ESP-IDF v4.2)
-
Windows에서 디버깅을 설정하려면
-
Espressif ESP32-DevKitC 및 ESP-WROVER-KIT에서 코드 디버깅(ESP-IDF v4.2)의 설명과 같이 FTDI C232HM-DDHSL-0의 USB 쪽을 컴퓨터 및 다른 쪽에 연결합니다. FTDI C232HM-DDHSL-0 디바이스가 디바이스 관리자의 범용 직렬 버스 컨트롤러에 나타날 것입니다.
-
범용 직렬 버스 디바이스 목록에서 C232HM-DDHSL-0 디바이스를 마우스 오른쪽 버튼으로 클릭하고 속성을 선택합니다.
참고
디바이스가 USB 직렬 포트로 나열될 수 있습니다.
디바이스의 속성을 보려면, 속성 창에서 세부 정보 탭을 선택합니다. 디바이스가 나열되지 않는 경우 FTDI C232HM-DDHSL-0용 Windows 드라이버
를 설치합니다. -
세부 정보 탭에서 속성을 선택한 후 하드웨어 ID를 선택합니다. 값 필드에 다음과 같이 표시되어야 합니다.
FTDIBUS\COMPORT&VID_0403&PID_6014이 예에서 공급업체 ID는 0403이고 제품 ID는 6014입니다.
이러한 ID가
projects/espressif/esp32/make/aws_demos/esp32_devkitj_v1.cfg의 ID와 일치하는지 확인합니다. 이 ID는 공급업체 ID 및 제품 ID 뒤에ftdi_vid_pid로 시작하는 줄에서 지정합니다.ftdi_vid_pid 0x0403 0x6014 -
Windows용 OpenOCD
를 다운로드합니다. -
C:\에 파일의 압축을 풀고C:\openocd-esp32\bin을 시스템 경로에 추가합니다. -
OpenOCD에는 libusb가 필요하며, 이 프로그램은 Windows에서 기본적으로 설치되지 않습니다. libusb를 설치하려면
-
zadig.exe
를 다운로드합니다. -
zadig.exe을(를) 실행합니다. Options(옵션) 메뉴에서 List All Devices(모든 디바이스 나열)를 선택합니다. -
드롭다운 메뉴에서 C232HM-DDHSL-0을 선택합니다.
-
녹색 화살표 오른쪽의 대상 드라이버 필드에서 WinUSB를 선택합니다.
-
대상 드라이버 필드 아래의 목록에서 화살표를 선택한 후 드라이버 설치를 선택합니다. Replace Driver(드라이버 바꾸기)를 선택합니다.
-
-
명령 프롬프트를 열고 FreeRTOS 다운로드 디렉터리의 루트로 이동하여 다음 명령을 실행합니다.
idf.py openocd이 명령 프롬프트를 열어 둡니다.
-
새 명령 프롬프트를 열고 FreeRTOS 다운로드 디렉터리의 루트로 이동하여 다음을 실행합니다.
idf.py flash monitor -
또 다른 명령 프롬프트를 열고 FreeRTOS 다운로드 디렉터리의 루트로 이동한 다음 보드에서 데모가 실행되기 시작할 때까지 기다립니다. 데모가 시작되면 다음을 실행합니다.
idf.py gdb프로그램이
main기능에서 중지해야 합니다.참고
ESP32는 최대 2개의 중단점을 지원합니다.
-
- macOS에서의 디버깅(ESP-IDF v4.2)
-
-
macOS용 FTDI 드라이버
를 다운로드합니다. -
OpenOCD
를 다운로드합니다. -
다운로드한 .tar 파일의 압축을 풀고
.bash_profile에서 경로를OCD_INSTALL_DIR/openocd-esp32/bin으로 설정합니다. -
다음 명령을 사용하여
libusb를 macOS에 설치합니다.brew install libusb -
다음 명령을 사용하여 직렬 포트 드라이버를 언로드합니다.
sudo kextunload -b com.FTDI.driver.FTDIUSBSerialDriver -
다음 명령을 사용하여 직렬 포트 드라이버를 언로드합니다.
sudo kextunload -b com.FTDI.driver.FTDIUSBSerialDriver -
macOS 버전 10.9 이상을 실행하는 경우 다음 명령을 사용하여Apple의 FTDI 드라이버를 언로드합니다.
sudo kextunload -b com.apple.driver.AppleUSBFTDI -
다음 명령을 사용하여 FTDI 케이블의 제품 ID와 공급업체 ID를 가져옵니다. 연결된 USB 디바이스가 나열됩니다.
system_profiler SPUSBDataTypesystem_profiler의 출력은 다음과 같습니다.DEVICE: Product ID: product-ID Vendor ID: vendor-ID (Future Technology Devices International Limited) -
projects/espressif/esp32/make/aws_demos/esp32_devkitj_v1.cfg파일을 엽니다. 디바이스의 공급업체 ID 및 제품 ID는ftdi_vid_pid로 시작하는 줄에서 지정합니다. 이전 단계에서 출력한system_profiler의 ID와 일치하도록 ID를 변경합니다. -
터미널 창을 열고 FreeRTOS 다운로드 디렉터리의 루트로 이동한 후 다음 명령을 사용하여 OpenOCD를 실행합니다.
idf.py openocd이 터미널 창을 열어 둡니다.
-
새 터미널을 열고 다음 명령을 사용하여 FTDI 직렬 포트 드라이버를 로드합니다.
sudo kextload -b com.FTDI.driver.FTDIUSBSerialDriver -
FreeRTOS 다운로드 디렉터리의 루트로 이동하여 다음을 실행합니다.
idf.py flash monitor -
또 다른 터미널을 새로 열고 FreeRTOS 다운로드 디렉터리의 루트로 이동하여 다음을 실행합니다.
idf.py gdb프로그램이
main에서 중지해야 합니다.
-
- Linux에서의 디버깅(ESP-IDF v4.2)
-
-
OpenOCD
를 다운로드합니다. tarball의 압축을 풀고 readme 파일의 설치 지침을 따릅니다. -
다음 명령을 사용하여 libusb를 Linux에 설치합니다.
sudo apt-get install libusb-1.0 -
터미널을 열고 ls -l /dev/ttyUSB*를 입력하여 컴퓨터에 연결된 모든 USB 디바이스를 나열합니다. 이 단계는 보드의 USB 포트가 운영 체제에서 인식되는지 확인하는 데 도움이 됩니다. 그러면 다음과 같은 결과가 표시됩니다.
$ls -l /dev/ttyUSB* crw-rw---- 1 root dialout 188, 0 Jul 10 19:04 /dev/ttyUSB0 crw-rw---- 1 root dialout 188, 1 Jul 10 19:04 /dev/ttyUSB1 -
로그오프했다가 다시 로그인하고 전원을 껐다가 다시 켜서 보드에 변경 사항을 적용합니다. 터미널 프롬프트에서 USB 디바이스를 나열합니다. 그룹 소유자가
dialout을plugdev로 변경했는지 확인합니다.$ls -l /dev/ttyUSB* crw-rw---- 1 root plugdev 188, 0 Jul 10 19:04 /dev/ttyUSB0 crw-rw---- 1 root plugdev 188, 1 Jul 10 19:04 /dev/ttyUSB1더 낮은 숫자의
/dev/ttyUSBn인터페이스가 JTAG 통신에 사용됩니다. 다른 인터페이스는 ESP32의 직렬 포트(UART)로 라우팅되며 코드를 ESP32의 플래시 메모리에 업로드하는 데 사용됩니다. -
터미널 창에서 FreeRTOS 다운로드 디렉터리의 루트로 이동하고 다음 명령을 사용하여 OpenOCD를 실행합니다.
idf.py openocd -
또 다른 터미널을 열고 FreeRTOS 다운로드 디렉터리의 루트로 이동하여 다음 명령을 실행합니다.
idf.py flash monitor -
또 다른 터미널을 열고 FreeRTOS 다운로드 디렉터리의 루트로 이동하여 다음 명령을 실행합니다.
idf.py gdb프로그램이
main()에서 중지되어야 합니다.
-
